Блок предназначен для моделирования фиксатора вращательного движения, который состоит из двух
вращающихся тел. На одном теле (условно корпусе) установлен фиксирующий механизм, а на втором
(условно роторе) расположены пазы для фиксатора. При прохождении фиксатора через паз
прикладывается тормозящий момент.
Относительное угловое положение φ, рад, рассчитываются по формуле:
где:
φB и φF – углы поворота на
портах "B" и "F" соответственно, рад
φfix – угловое положение ближайшего фиксатора, рад
Возможно располагать фиксаторы на равном расстоянии друг от друга, либо задавать их положение
вручную.
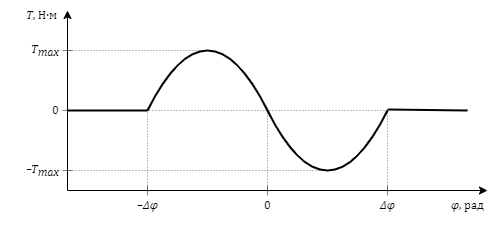
Тормозящий момент возможно задавать аналитически или таблично. Аналитически тормозящий момент
T, Н·м, рассчитывается по формуле:
где:
Tmax – максимальный момент, Н·м
Δφ – зона действия момента, рад
Если относительное угловое положение вышло за зону действия момента, то тормозящий момент
равен нулю (Рисунок
1).
Рисунок 1. Зависимость тормозящего момента от относительного углового положения
Входные порты
Имя
Описание
Тип линии связи
B
Порт для подключения условно неподвижного корпуса
Механика вращательная
F
Порт для подключения условно подвижного вала
Механика вращательная
Выходные порты
Блок не имеет выходных портов.
Свойства
Название
Имя
Описание
По умолчанию
Тип данных
Положение
фиксаторов
Группа свойств,
задающих положение фиксаторов
Способ задания положения фиксаторов
FiType
Позволяет выбрать способ задания положения
фиксаторов. Возможные значения: "На равном расстоянии",
"Вручную"