Блок предназначен для моделирования фиксатора поступательного движения, который состоит из
двух поступательно движущихся тел. На одном теле (условно корпусе) установлен фиксирующий
механизм, а на втором (условно стержне) расположены пазы для фиксатора. При прохождении
фиксатора через паз прикладывается тормозящая сила.
Относительное линейное положение s, м, рассчитываются по формуле:
где:
sB и sF – положения тел на портах "B" и
"F" соответственно, м
sfix – линейное положение ближайшего фиксатора, м
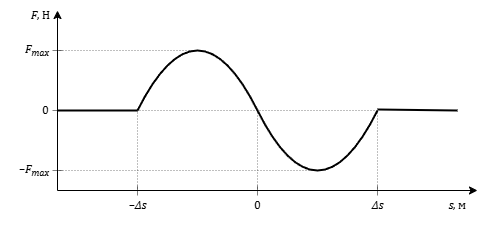
Тормозящую силу возможно задавать аналитически или таблично. Аналитически тормозящая сила
F, Н, рассчитывается по формуле:
где:
Fmax – максимальная сила, Н
Δs – зона действия силы, рад
Если относительное линейное положение вышло за зону действия силы, то тормозящая сила равна
нулю (Рисунок
1).
Рисунок 1. Зависимость тормозящей силы от относительного линейного положения