Соединение шарнир-ползун
 |
 |
| Си | |
| в палитре | на схеме |
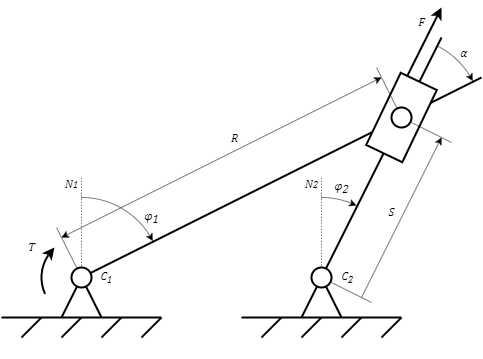
Блок позволяет моделировать механизмы, у которых плоскости крепления шарниров C1 и С2 располагаются параллельно или перпендикулярно (крепление к вертикальной плоскости). На рисунке (Рисунок 1) приведен механизм с параллельным расположением плоскостей крепления шарниров. В случае произвольного расположения плоскостей крепления шарниров следует учитывать это при определении угла α.
Блок позволяет задавать направления отсчета угла и линейного положения ползуна: если вращательное и поступательное движение осуществляется "в одну сторону", то увеличение угла на порте "С1" (угол φ1) будет соответствовать увеличению линейного положения на порте "S". На рисунке (Рисунок 1) приведен механизм с движением "в разные стороны", поскольку увеличение угла φ1 соответствует уменьшению положения S.
Блок описывается уравнениями:
- ω – угловая скорость на порте "С", рад/с
- v – линейная скорость на порте "S", м/с
- ε – угловое ускорение на порте "С", рад/с2
- a – линейное ускорение на порте "S", м/с2
- T – крутящий момент, подаваемые на порт "С", Н·м
- F – сила, подаваемая на порт "S", Н
- K – коэффициент связи, м
- dir – величина, указывающая совпадение направлений отсчета угла φ1 и линейного положения S, имеет значение 1 или -1
- R – расстояние между шарнирами (Рисунок 1), м
- α – угол между телами, рад. Как правило, определяется разностью углов φ1 и φ2 (Рисунок 1)
Блок определяет крутящий момент T и силу F, решая уравнение связи.
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| S | Порт для подключения блоков модели к движущемуся телу. Профиль движения на порте определяет движение ползуна относительно направляющей | Механика поступательная |
| C | Порт для подключения блоков модели к вращающемуся телу | Механика вращательная |
| A | Задаваемый угол между телами | Математическая |
| R | Задаваемое расстояние между шарнирами | Математическая |
Выходные порты
Блок не имеет выходных портов.
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Расположение поверхностей крепления шарниров | Orient | Позволяет задать расположение поверхностей. Возможные значения: "Перпендикулярно", "Параллельно" | Перпендикулярно | Перечисление |
| Направление движения портов C и S | Dir | Позволяет задать Направление движения портов "С" и "S". Возможные значения: "В одну сторону", "В разные стороны" | В одну сторону | Перечисление |
| Постоянная времени для решения НАУ, с | Tau | Постоянная времени для решения НАУ. Используется для решения уравнения связи | 0.01 | Вещественное |
Параметры
| Название | Имя | Описание | Тип данных |
|---|---|---|---|
| Порт С | Группа параметров, отображающих параметры вращательного движения на порте "С" | ||
| Угол поворота, рад | Fi | Значение угла поворота на порте "С" | Вещественное |
| Угловая скорость, рад/с | W | Значение угловой скорости на порте "С" | Вещественное |
| Угловое ускорение, рад/с2 | Eps | Значение углового ускорения на порте "С" | Вещественное |
| Момент, Н·м | T | Крутящий момент, с которым блок воздействует на тела, подключенные к порту "C" | Вещественное |
| Порт S | Группа параметров, отображающих параметры поступательного движения на порте "S" | ||
| Перемещение, м | S | Значение перемещения на порте "S" | Вещественное |
| Скорость, м/с | V | Значение скорости на порте "S" | Вещественное |
| Ускорение, м/с2 | A | Значение ускорения на порте "S" | Вещественное |
| Сила, Н | F | Сила, с которой блок воздействует на тела, подключенные к порту "S" | Вещественное |