О расчетном коде библиотеки
Библиотека предназначена для моделирования одномерного вращательного или поступательного движения, например, вращения валов и поступательного движения системы тележек.
- силовым воздействием (крутящим моментом или силой), под действием которого тело совершает движение
- координатой (углом поворота или линейным положением)
- скоростью (угловой или линейной)
- ускорением (угловым или линейным)
Базовый принцип моделирования динамики движения тел
Модели механических систем состоят из блоков, соединенных механическими линиями связи. Блоки данной библиотеки являются субмоделями, внутри которых из элементарных математических блоков и передаточных функций реализованы уравнения, описывающие функционирование тех или иных элементов механических систем.
Механические линии связи соединяют выходные порты одних блоков с входными портами других блоков и являются направленными шинами данных, по которым между блоками осуществляется обмен значениями описанных выше величин. От выходного порта к входному (в направлении линии связи) передаются значения координаты, скорости и ускорения движения тела (профиль движения тела), а в обратную сторону – значение силового воздействия, действующего на это тело.
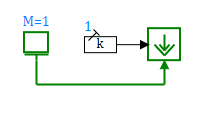
Линия связи направлена от блока Масса к блоку Источник силы, у которого для наглядности включен режим показа стрелок входных портов. Блок Масса, имеющий выходной механический порт, передает на линию связи значения координаты, скорости и ускорения тела, а блок Источник силы, имеющий входной механический порт, передает на линию связи значение силы. В общем случае блоки с выходными механическими портами рассчитывают профиль движения тела, а блоки с входными механическими портами рассчитывают силы и крутящие моменты, действующие на подключенные к ним тела.
Движение тела под действием нескольких сил
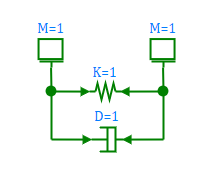
Механические линии связи допускают ветвление, позволяя соединять один выходной порт с множеством входных портов. Блок с выходным механическим портом, моделирующий движение тела, передает на линию связи профиль движения тела. Блоки с входными механическими портами рассчитывают значения силовых воздействий в зависимости от параметров профиля движения: сила упругости пружины зависит от координаты тела, сила вязкого трения – от его скорости и так далее. Блок, моделирующий движение тела, принимает значения силовых воздействий со всех подключенных к нему блоков и моделирует движение тела под действием суммарной силы или крутящего момента. Таким образом с помощью ветвления механической линии связи осуществляется моделирование действия нескольких сил или крутящих моментов на одно тело.
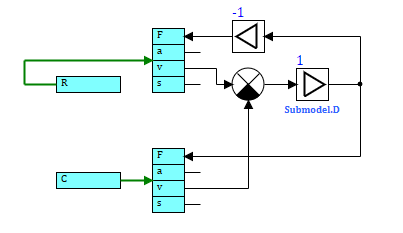
Блок считывает значения линейных скоростей с каждого из своих входных механических портов "C" и "R", определяет значение силы демпфирования и передает его обратно на порты "C" и "R". При этом значения сил на разных портах этих блоков имеют противоположные знаки в соответствии с 3-м законом Ньютона. Аналогичным образом реализована модель пружины.
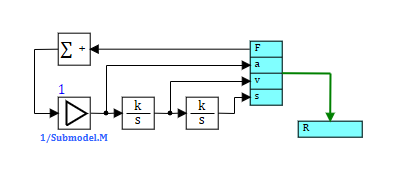
Блок считывает значения сил с выходного механического порта "R", суммирует их и определяет ускорение, скорость и координату тела, движущегося под действием суммарной силы. Рассчитанные значения передаются на механическую линию связи.
Преобразование движения
Ряд блоков библиотеки моделируют различного рода редукторы и механические передачи. Блоки, имеющие один входной механический порт и произвольное количество выходных механических портов (зачастую всего один), осуществляют преобразование профиля движения и действия внешних сил. Например, на выходной порт (ведомый вал) понижающего редуктора будет подаваться профиль движения с пропорционально меньшей скоростью, чем на входном порте (ведущий вал). А на входной порт (ведущий вал) будет подаваться значение крутящего момента пропорционально меньшее, чем значение крутящего момента на выходном порте (ведомый вал). Подробное описание подхода к моделированию редукторов и других элементов преобразования движения приведено на странице Моделирование передаточных отношений.
Интерфейс механических линий связи
Допускается формирование пользовательских блоков, имеющих механические порты и используемых в качестве элементов модели механической системы. Для совместной работы библиотечных и пользовательских блоков пользовательские блоки должны иметь двунаправленную шину данных с идентичными правилами формирования и именами передаваемых величин.
Для формирования двунаправленной шины данных в механической линии связи используются блоки Двунаправленная шина (Вход) и Двунаправленная шина (Выход). Оба данных блока допускается использовать для реализации как входных, так и выходных механических портов.
- Для вращательного движения:
- T – крутящий момент, Н·м
- fi – угол поворота, рад
- w – угловая скорость, рад/с
- eps – угловое ускорение, рад/с2
- Для поступательного движения:
- F – сила, Н
- s – линейное положение, м
- v – линейная скорость, м/с
- a – линейное ускорение, м/с2
Блоки Двунаправленная шина (Вход) и Двунаправленная шина (Выход) на выходных вращательных портах должны иметь выходной порт "T" и входные порты "fi", "w", и "eps". Блоки Двунаправленная шина (Вход) и Двунаправленная шина (Выход) на выходных поступательных портах должны иметь выходной порт "F" и входные порты "s", "v", и "a". На входных портах направление портов блоков Двунаправленная шина (Вход) и Двунаправленная шина (Выход) должны быть изменены на противоположные.
Подробное описание процесса разработки пользовательского блока приведено на странице Создание блоков с помощью блока "Субмодель".