Блок предназначен для моделирования планетарного зубчатого зацепления вида "Планета-Планета"
с постоянным передаточным отношением и постоянным КПД. Кинематическая схема редуктора
приведена на рисунке (Рисунок 1).
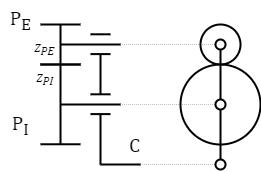
Рисунок 1. Кинематическая схема планетарной передачи Планета-Планета
Планетарная передача состоит из:
Внешней планеты PE (external planet) с числом зубьев
ZPE
Внутренней планеты PI (internal planet) с числом зубьев
ZPI
Водила C (carrier)
Блок описывается следующим кинематическим соотношением:
где:
ωPI – угловая скорость внутренней планеты, рад/с
ωPE – угловая скорость внешней планеты, рад/с
ωC – угловая скорость водила, рад/с
Внимание:
угловая скорость планеты отсчитывается относительно неподвижной системы
координат.
Для удовлетворения кинематического соотношения блок осуществляет решение уравнения связи.
Подробное описание подхода к моделированию передаточных отношений приведено на странице Моделирование передаточных отношений. Подробное описание подхода к моделированию
потерь в зубчатых зацеплениях приведено на странице Моделирование КПД редукторов.
Рядом с блоком отображается значение передаточного отношения U.
Входные порты
Имя
Описание
Тип линии связи
P_int
Порт для подключения вала внутренней планеты (internal planet)
Механика вращательная
P_ext
Порт для подключения вала внешней планеты (external planet)
Механика вращательная
C
Порт для подключения водила (carrier)
Механика вращательная
Выходные порты
Имя
Описание
Тип линии связи
Q
Потери мощности на трение в подшипниках и зубчатом зацеплении (КПД)
Мощность, передаваемая с планетарной передачи на
подключенные блоки. Отрицательное значение означает, что внутренняя планета является
ведущим элементом передачи
Мощность, передаваемая с планетарной передачи на
подключенные блоки. Отрицательное значение означает, что внешняя планета является
ведущим элементом передачи