Блок предназначен для моделирования планетарного конического зубчатого зацепления вида
"Звезда-Планета" с постоянным передаточным отношением и постоянным КПД. Кинематическая схема
редуктора приведена на рисунке (Рисунок
1).
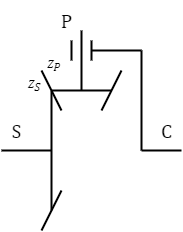
Рисунок 1. Кинематическая схема планетарной конической передачи Звезда-Планета
Планетарная передача состоит из:
Звезды S (sun) с числом зубьев ZS
Планеты P (planet) с числом зубьев ZP
Водила C (carrier)
Блок описывается следующим кинематическим соотношением:
где:
ωS – угловая скорость звезды, рад/с
ωC – угловая скорость водила, рад/с
ωP – угловая скорость планеты, рад/с
dir – величина, указывающая совпадение направлений вращения валов звезды и
планеты, имеет значение 1 или -1
Для удовлетворения кинематического соотношения блок осуществляет решение уравнения связи.
Подробное описание подхода к моделированию передаточных отношений приведено на странице Моделирование передаточных отношений. Подробное описание подхода к моделированию
потерь в зубчатых зацеплениях приведено на странице Моделирование КПД редукторов.
Входные порты
Имя
Описание
Тип линии связи
S
Порт для подключения вала звезды (sun)
Механика вращательная
P
Порт для подключения вала планеты (planet)
Механика вращательная
C
Порт для подключения водила (carrier)
Механика вращательная
Выходные порты
Имя
Описание
Тип линии связи
Q
Потери мощности на трение в подшипниках и зубчатом зацеплении (КПД)