Дифференциалы
Модель дифференциалов автомобиля
Расположение
SimInTech\Demo\Механика\Редукторы\Дифференциалы\Дифференциалы.prt
Описание
Данный проект демонстрирует возможности библиотеки "Механика" по моделированию свободного и самоблокирующегося межосевых дифференциалов автомобиля.

Свободный дифференциал состоит из левой и правой полуосей SL и SR с установленными на них коническими шестернями-звездами, корпуса C, конических шестерней-планет P и ведущего вала D с конической шестерней, входящей в зацепление с конической шестерней, установленной на корпусе.
Самоблокирующийся дифференциал состоит из левой и правой полуосей SL и SR с установленными на них червячными шестернями-звездами, корпуса C, червяков-планет P с установленными на их валах шестернями, входящими в зацепление друг с другом, и ведущего вала D с конической шестерней, входящей в зацепление с конической шестерней, установленной на корпусе.
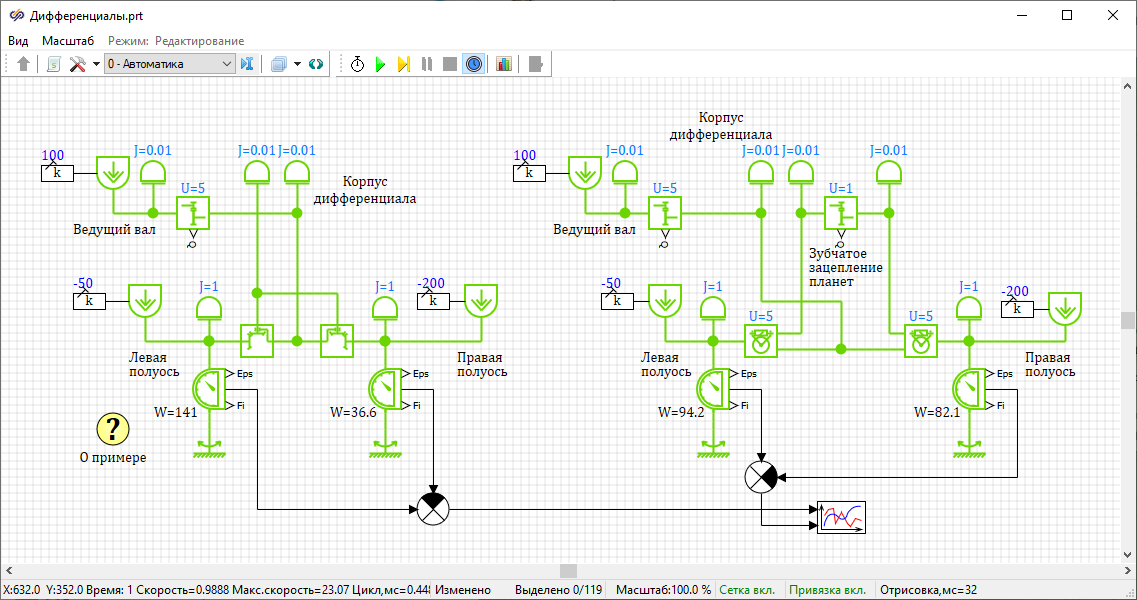
Блоки "Инерция" моделируют вращение элементов дифференциала.
Блоки "Источник момента" моделируют действие крутящего момента с ведущего вала и моментов сил трения колес о грунт.
Блок "Простой редуктор" моделирует зубчатое зацепление ведущей шестерни и зубчатого колеса на корпусе дифференциала.
Блоки "Планетарная коническая передача Звезда-Планета" моделируют зацепление шестерней-звезд полуосей с одной и той же шестерней-планетой. Водилом планетарного механизма является корпус дифференциала.
В правой части представлена модель самоблокирующегося дифференциала (Рисунок 2).
Моделирование вращения элементов дифференциала, действия внешних моментов и зубчатого зацепления ведущей шестерни и зубчатого колеса на корпусе дифференциала осуществляется аналогично модели свободного дифференциала.
Блоки "Планетарная червячная передача Звезда-Планета" моделируют зацепление шестерней-звезд полуосей с разными червяками-планетами. Водилом планетарного механизма является корпус дифференциала.
На валах червяков-планет установлены шестерни-планеты, входящие в зацепление друг с другом. Данное зацепление моделируется блоком "Простой редуктор".
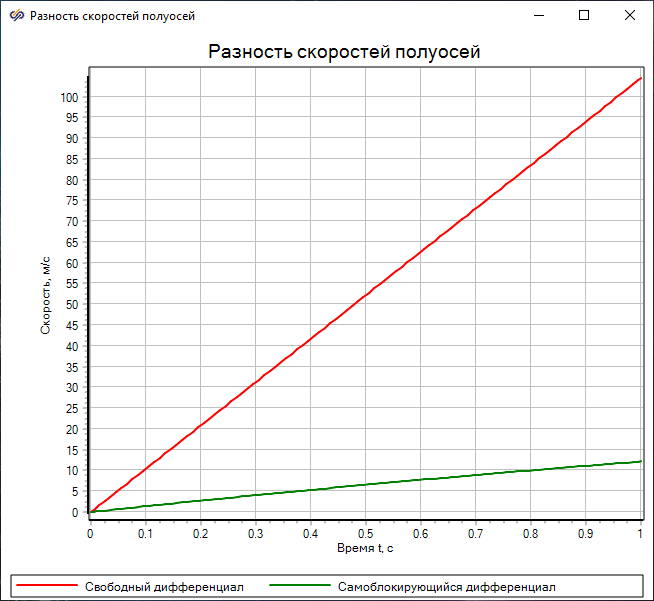
Из-за того, что левые полуоси нагружены меньше, чем правые, в свободном дифференциале левая полуось вращается быстрее, чем правая, в то время как в самоблокирующемся дифференциале скорости вращения полуосей практически совпадают.