В блоке реализована модель конической муфты. В состав модели входят ведущая полумуфта B и
ведомая полумуфта A. Передача момента происходит за счет кулоновской силы трения между
соприкасающимися поверхностями двух полумуфт.
Рисунок 1. Коническая муфтаУравнения модели имеют следующий вид:
где: Tfr - внутренний момент трения;
TB - внешний момент на ведущей полумуфте; TF - внешний
момент на ведомой полумуфте; Ts - максимальный момент страгивания;
ωB - угловая скорость ведущей полумуфты; ωF - угловая
скорость ведомой полумуфты; ω - угловая скорость скольжения; Reff -
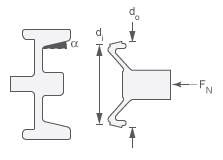
эффективный радиус диска; Nfr - прижимная сила; α - угол конуса;
Do - внешний диаметр поверхности контакта; Di -
внутренний диаметр поверхности контакта; Μu - кинематический коэффициент
контактного трения; B - коэффициент вязкого трения; ωtol - порог
скорости; JB - момент инерции порта B; JF - момент инерции
порта F; IsLock - признак сцепления.
Порты
Блок имеет один математический порт, через который на вход модели поступает значение
прижимной силы. А также два механических ненаправленных порта вращательного движения, через
которые на вход блока поступают моменты от присоединенных блоков, а на выход - скорости
портов B и F.
Свойства
Do - внешний диаметр поверхности контакта, м;
Di - внутренний диаметр поверхности контакта, м;
Alfa - угол конуса, град;
MType - тип задания контактного трения
(постоянный/табличный);
Mu - кинематический коэффициент контактного трения;
Mus - коэффициент страгивания;
Vx - массив скоростей (аргумент), рад/с;
My - массив кинематических коэффициентов (функция);