В блоке реализована модель пружинно-демпферной системы вращательного движения, в состав
которой входит пружина, демпфер, ограничитель, а также учитывается кулоновская сила
трения.
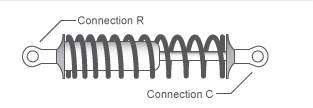
Рисунок 1. АмортизаторУравнения модели имеют следующий вид:
где: T - внутренний момент трения;
Tspr - момент пружины; Td - момент демпфирования;
Tc - кулоновский момент; THS - момент упора; K
- коэффициент жесткости пружины; B - коэффициент демпфирования; Tk -
прижимной момент; Mu - кинематический коэффициент контактного трения;
Ks - отношение статического коэффициента к кинематическому;
Wth - порог скорости; Lb - нижний упор;
Ub - верхний упор; KHS - коэффициент жесткости упора;
bHS - коэффициент демпфирования упора; Jr - момент
инерции порта R; Jc - момент инерции порта C; ωr - угловая
скорость порта R; ωc - угловая скорость порта С; Tr - суммарный
внешний момент на порт R; Tc - суммарный внешний момент на порт С.
Порты
Блок имеет два механических ненаправленных порта вращательного движения, через которые на
вход блока поступают моменты от присоединенных блоков, а на выход - угловые скорости портов
R и C.
Свойства
K - коэффициент жесткости пружины, Н·м/рад;
B - коэффициент демпфирования, Н·м·с/рад;
Tk - прижимной момент, Н·м;
Mu - кинематический коэффициент контактного трения;
Ks - отношение статического коэффициента к
кинематическому;