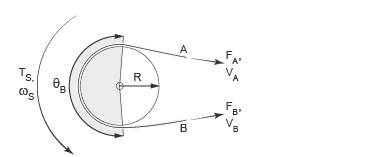
В блоке реализована модель взаимодействия шкива и ремня (плоского или клиновидного). Схема
приведена на рисунке.
Рисунок 1. Шкив ременной передачиУравнения модели имеют следующий вид:
где: Vrel - скорость скольжения;
VA - скорость ремня порт А; VB - скорость ремня порт
B; ws - угловая скорость шкива; Fc - центробежная сила
ремня; FA - сила на ремень порт А; FB - сила на ремень
порт B; Ffr - сила трения между шкивом и ремнем; Ts -
момент на шкив; R - радиус шкива; B - коэффициент трения подшипников; f -
коэффициент трения между ремнем и шкивом; Vth - порог скорости; ρ -
масса ремня на единицу длины; θ - угол обхвата.
Для клиновидного ремня коэффициент трения вычисляется следующим образом:
где: Fi -
угол клина ремня.
Порты
Блок имеет один механический ненаправленный порт поступательного движения (А), через
который на вход блока поступает значение скорости, а на выход - сила. А также один
механический ненаправленный порт вращательного движения (S), через который на вход блока
поступают моменты от присоединенных блоков, а на выход - скорость вращения, а также один
механический ненаправленный порт поступательного движения (B), через который на вход блока
поступают силы от присоединенных блоков, а на выход - скорость.
Свойства
BType - тип ремня (плоский или клиновидный);
N - число ремней;
Fi - угол клина ремня, град;
M - масса ремня на единицу длины, кг/м;
Dir - угловая скорость и скорость порта А (одного или разных
знаков);