Встроенный ПИД-регулятор
 |
 |
|
| в палитре | на схеме |
Описание
Блок предназначен для автономного управления параметрами теплогидравлической схемы без привлечения скриптового языка или использования сигналов в базе данных, источниками которых являются другие проекты ПК SimInTech.
В блоке реализован алгоритм работы в П-, ПИ-, ПИД-регулятора с возможностью ввода до трех корректирующих сигналов (функциональных обратных связей).
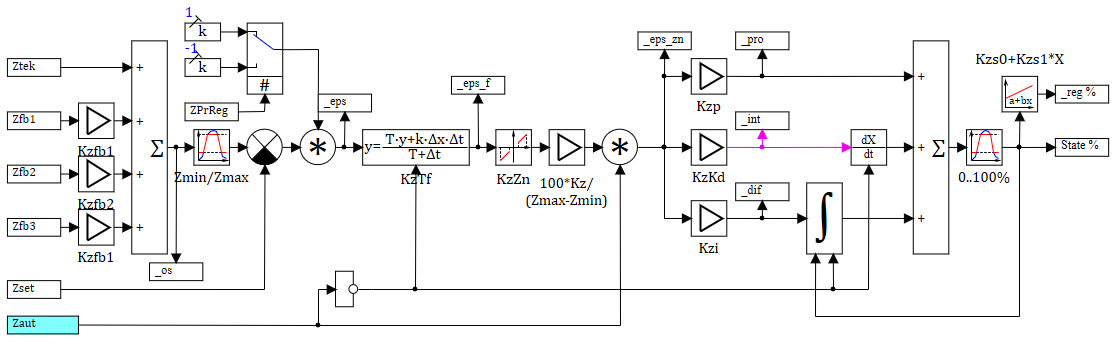
Сигналы функциональных обратных связей "Zfb1", "Zfb2", "Zfb3" со своими весовыми коэффициентами "Kzfb1", "Kzfb2", "Kzfb3" складываются с сигналом регулируемого параметра "Ztek". В результате получаем сигнал обратной связи "_os", который ограничивается снизу и сверху заданными пределами изменения регулируемого параметра "Zmin", "Zmax".
Сигнал рассогласования "_eps" формируется в результате вычитания из сигнала обратной связи заданного значения регулируемого параметра "Zset". Если задан признак регулирования "ZPrReg" "После себя", то значение сигнала рассогласования инвертируется. Затем сигнал рассогласования сглаживается, проходя через апериодическое звено первого порядка с постоянной времени "KzTf" и поступает на вход блока "Формирование зоны нечувствительности". Если вход данного блока меньше заданной зоны нечувствительности "Kzn", то выходной сигнал блока равен нулю, иначе он вычисляется по формуле (#idHS_Arm_Vstroennyj_PID_regul__fig_qkt_4hv_c1c).
ef – сигнал рассогласования после фильтрации;
Kzn – зона нечувствительности;
sign – функция, определяющая знак числа;
Далее сигнал рассогласования приводится к процентам и поступает на вход собственно ПИД-регулятора. Выходной сигнал ПИД-регулятора "state" представляет собой заданное положение исполнительного механизма (ИМ) и ограничивается (как и выход И-составляющей) значениями 0-100 %. В качестве исполнительного механизма в большинстве случаев выступают запорно-регулирующие клапана.
В блоке предусмотрен еще один выходной параметр - выход регулятора "reg", который представляет собой линейную функцию от параметра "state", и также может использоваться для управления параметрами теплогидравлической схемы.
При отключенном состоянии ПИД-регулятора ("Zaut" = 0) сигнал рассогласования, П- и Д- составляющие обнуляются, а выход И- составляющей запоминается и равен значению выхода блока "state" на момент отключения.
Обычная практика использования блока состоит в том, что его выходные параметры ("state" или "reg") используются в качестве сигналов для управления положением запорно-регулирующей арматуры, установленной на расчетной теплогидравлической схеме.
- Управление запорно-регулирующей арматурой с целью поддержания параметров в каком-либо объекте теплогидравлической схемы (например, этап автономной отладки теплогидравлической модели, работающей в составе комплексной модели, когда модель "штатной" системы автоматического регулирования (или ее часть) находится еще в разработке, а для устойчивой работы теплогидравлической модели необходима работа всех регуляторов)
- Управление нерегулируемым (с точки зрения технологической схемы) сливом из одного бака в другой, недостаточно корректно описываемый гидравлическим модулем программы "HS" (например, самостоятельный слив конденсата греющего пара из сепаратора СПП в сепаратосборник СПП, осуществляемый при малых перепадах давления между двумя баками)
- Моделирование теплообменников, характеристика которых задается в виде табличных функций, получаемых путем эксперимента (управление коэффициентом сопротивления и энерговыделением в каналах этого теплообменника).
Совместимые блоки
Блок "Встроенный ПИД-регулятор" может быть установлен в качестве дочернего на любой блок библиотеки, а также нажатием ПКМ вставлен без подчинения блоку-владельцу. Возможность установки блока на родительский блок необходима лишь для того, чтобы в формулах для вычисления значений свойств блока могли использоваться не только абсолютные имена сигналов, но и параметры блока-владельца, используя шаблон "parent.<имя параметра>". Если блок вставлен без привязки к блоку-владельцу, то будет необходимо указывать полный путь к необходимому параметру другого блока.
Входные порты
Блок не имеет входных портов.
Выходные порты
Блок не имеет выходных портов.
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Связи | Входные сигналы блока | |||
| Текущее значение регулируемой величины, е.и. | Ztek | Значение регулируемой величины, которое необходимо поддерживать или изменять по заданному закону | 0 | Вещественное |
| Сигнал ОС1 | Zfb1 | Сигнал функциональной обратной связи 1 | 0 | Вещественное |
| Сигнал ОС2 | Zfb2 | Сигнал функциональной обратной связи 2 | 0 | Вещественное |
| Сигнал ОС3 | Zfb3 | Сигнал функциональной обратной связи 3 | 0 | Вещественное |
| Параметры настройки | Настройки ПИД - регулятора | |||
| Начальное состояние | Zs0 | Сигнал исполнительному механизму (значение параметра "state") в начальный момент времени | 0 | Вещественное |
| Регулятор включен | Zaut | Включение/выключение ПИД - регулятора | Да | Двоичное |
| Регулирование после себя | ZPrReg | Свойство меняет знак сигнала рассогласования на входе в ПИД-регулятор | Да | Двоичное |
| Минимальное значение регулируемой величины, е.и. | Zmin | Нижняя граница для значения регулируемой величины | 0 | Вещественное |
| Максимальное значение регулируемой величины, е.и. | Zmax | Верхняя граница для значения регулируемой величины | 200 | Вещественное |
| Уставка, е.и. | Zset | Значение величины уставки. Желаемая величина, на которую регулятор должен выйти в установившемся режиме | 100 | Вещественное |
| Постоянная времени фильтра, с | KzTf | Постоянная времени апериодического звена | 1 | Вещественное |
| Зона нечувствительности, е.и. | Kzn | Значение допустимого отклонения регулируемой величины, в пределах которого регулятор не срабатывает. | 1 | Вещественное |
| Общий коэффициент усиления | Kz | Коэффициент усиления сигнала рассогласования перед поступлением на П-,И- и Д- составляющие регулятора | 1 | Вещественное |
| Коэффициент при ОС-1 | Kzfb1 | Весовой коэффициент при сигнале функциональной обратной связи 1 | 0 | Вещественное |
| Коэффициент при ОС-2 | Kzfb2 | Весовой коэффициент при сигнале функциональной обратной связи 2 | 0 | Вещественное |
| Коэффициент при ОС-3 | Kzfb3 | Весовой коэффициент при сигнале функциональной обратной связи 3 | 0 | Вещественное |
| Коэффициент при П-части | Kzp | Коэффициент при пропорциональной части | 0.1 | Вещественное |
| Коэффициент при И-части, 1/с | Kzi | Коэффициент при интегральной части | 0.1 | Вещественное |
| Коэффициент при Д-составляющей | KzKd | Коэффициент при дифференциальной части | 0 | Вещественное |
| Постоянная времени Д-составляющей, с | KzTd | Постоянная времени дифференциальной части | 1 | Вещественное |
| Коэффициент К1 в Zr=K0+K1*Zs | Kzs1 | Соответствующий коэффициент в формуле линейной зависимости | 1 | Вещественное |
| Коэффициент К0 в Zr=K0+K1*Zs | Kzs0 | Соответствующий коэффициент в формуле линейной зависимости | 0 | Вещественное |
| Оформление | Настройка отображения блока на схеме | |||
| Редакция названия на схеме | _Capt_Edit | Делает имя блока на схеме редактируемым/не редактируемым | Нет | Двоичное |
| Название в две строки | _NumRows | Позволяет записывать название блока одну или две строки | Нет | Двоичное |
| Цвет в открытом состоянии | clr_open | Отвечает за индикацию степени открытия исполнительного механизма на схеме | 255 | Цвет |
| Цвет в закрытом состоянии | clr_close | Отвечает за индикацию степени открытия исполнительного механизма на схеме | 65280 | Цвет |
| Имя | _Name | Определяет имя блока | Reg_0 | Строка |
| Название на схеме | _Capt | Определяет отображаемое на схеме название | Reg_0 | Текст |
Параметры
| Название | Имя | Описание (опционально) | Тип данных |
|---|---|---|---|
| П-составляющая, % | _pro | Выходной сигнал пропорциональной части | Вещественное |
| И-составляющая, % | _int | Выходной сигнал интегральной части | Вещественное |
| Д-составляющая, % | _dif | Выходной сигнал дифференциальной части | Вещественное |
| Требуемое положение РК, % | state | Выходной сигнал регулятора, которое он передаёт на исполнительный механизм | Вещественное |
| Выход регулятора % | _reg | Выходной сигнал регулятора, которое он передаёт на исполнительный механизм. Линейно зависит от параметра "state" | Вещественное |
| Вклад обратных связей, е.и. | _fb | Выходной сигнал функциональных обратных связей с соответствующими весовыми коэффициентами | Вещественное |
| Обратная связь, е.и. | _os | Сигнал обратной связи, формируемый как сумма сигнала регулируемого параметра и сигналов функциональных обратных связей с соответствующими весовыми коэффициентами | Вещественное |
| Рассогласование на входе, е.и. | _eps | Сигнал рассогласования между сигналом обратной связи и текущим значением регулируемой величины входе | Вещественное |
| Рассогласование после фильтрации, е.и. | _eps_f | Сигнал рассогласования между сигналом обратной связи и текущим значением регулируемой величины после фильтрации | Вещественное |
| Рассогласование после зоны нечувствительности, % | _eps_zn | Сигнал рассогласования между сигналом обратной связи и текущим значением регулируемой величины после учёта зоны нечувствительности | Вещественное |