Встроенный ПИД-регулятор
Описание демо-примера
Расположение
SimInTech\Demo\Теплогидравлика\Арматура\Встроенный ПИД-регулятор\Встроенный ПИД-регулятор.prt
Описание
В данном демо-примере показано использование блока "Встроенный ПИД-регулятор" для управления запорно-регулирующей арматурой с целью поддержания параметров в объекте теплогидравлической схемы. В данном примере регулятор настроен на поддержание постоянного уровня жидкости ("level") в блоке "Бак закрытый". В данном примере блок осуществляет ПИ-регулирование (Д-составляющая равна нулю).
Исполнительным механизмом (ИМ) выступает регулирующий клапан (РК), реализованный при помощи блока "Задвижка".
Для демонстрации важности правильного задания весовых коэффициентов П- и И-составляющих в примере установлены три идентичные модели баков, которые отличаются друг от друга только весовыми коэффициентами "Kzp" и "Kzi", а также наличием или отсутствием сигнала обратной связи по положению регулирующего клапана. В первых двух моделях все сигналы обратных связей равны 0. В третьей модели введена отрицательная обратная связь по положению РК.
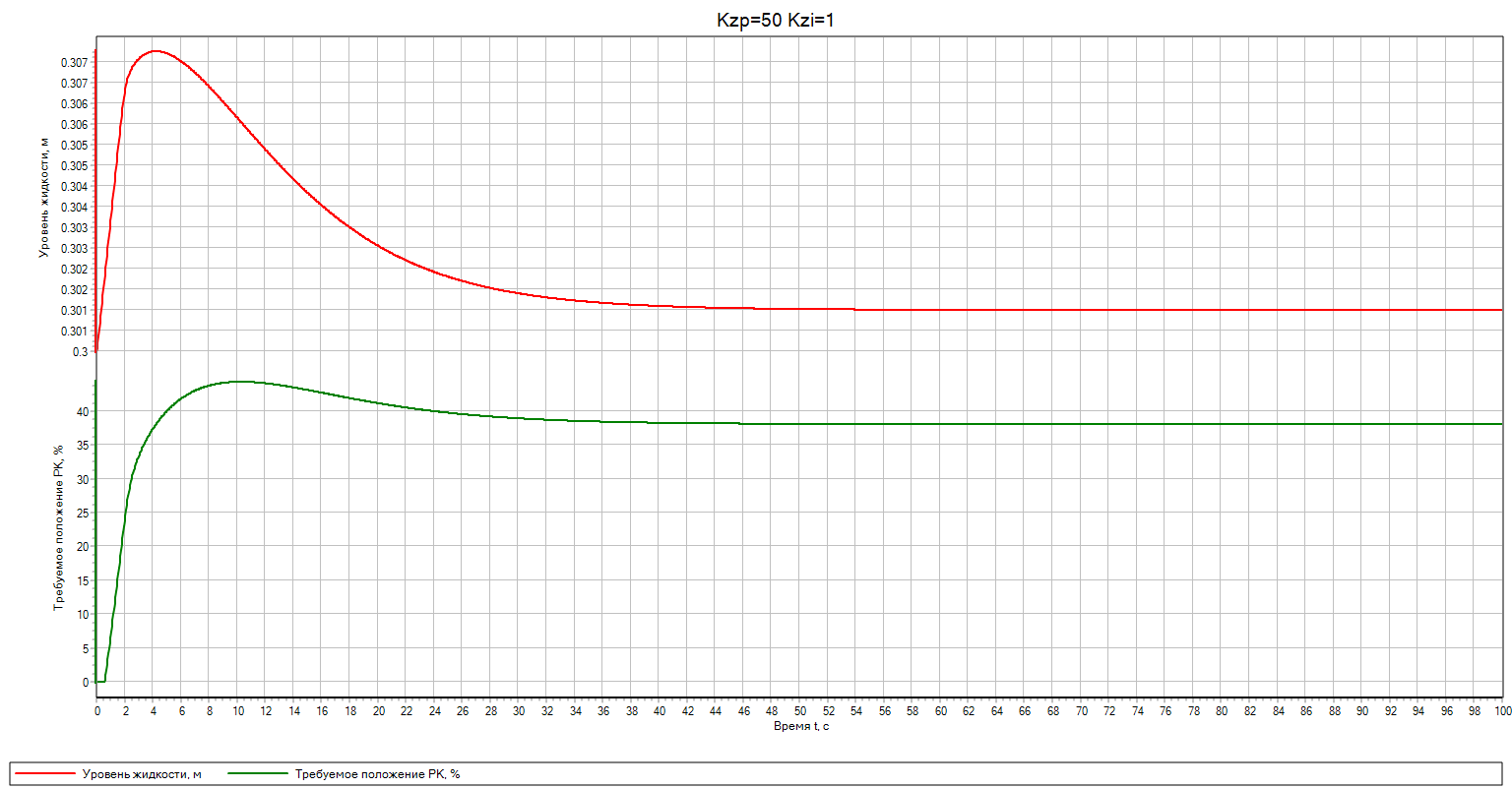
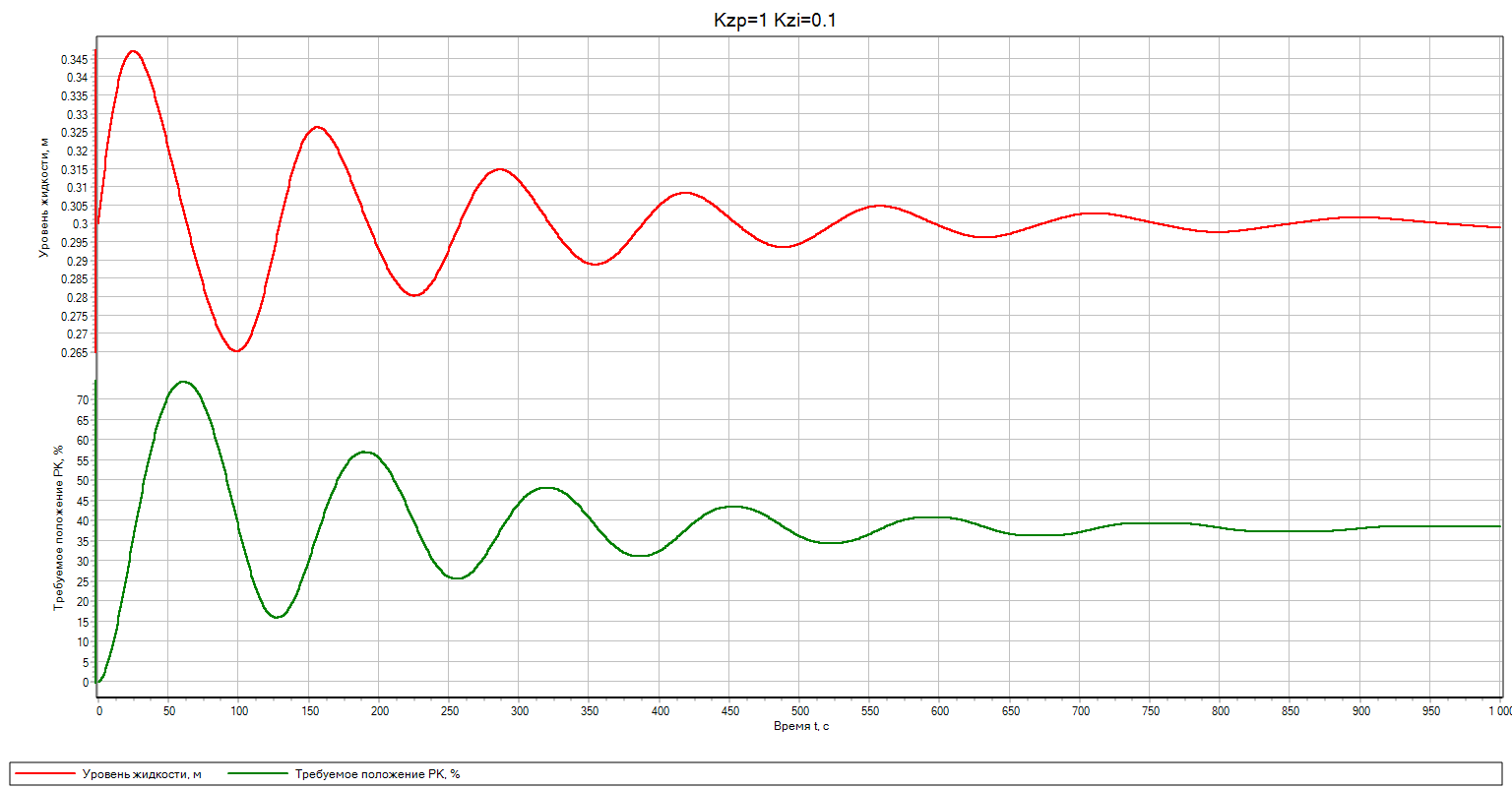
На графики выводятся изменения уровня в баке и изменение положения РК. Для наглядности на графиках приведены изменения уровня в баке при разных значениях "Kzp" и "Kzi". Из них хорошо видно, что при маленьких значениях этих коэффициентов ("Kzp"=1 и "Kzi"=0,1) поведение уровня в баке носит ярко выраженный слабозатухающий колебательный характер, а переходный процесс не заканчивается за расчетное время в 1000 секунд, в то время как при правильно подобранных коэффициентах ("Kzp"=50 и "Kzi"=1) для получения стационарного состояния требуется менее 50 секунд.
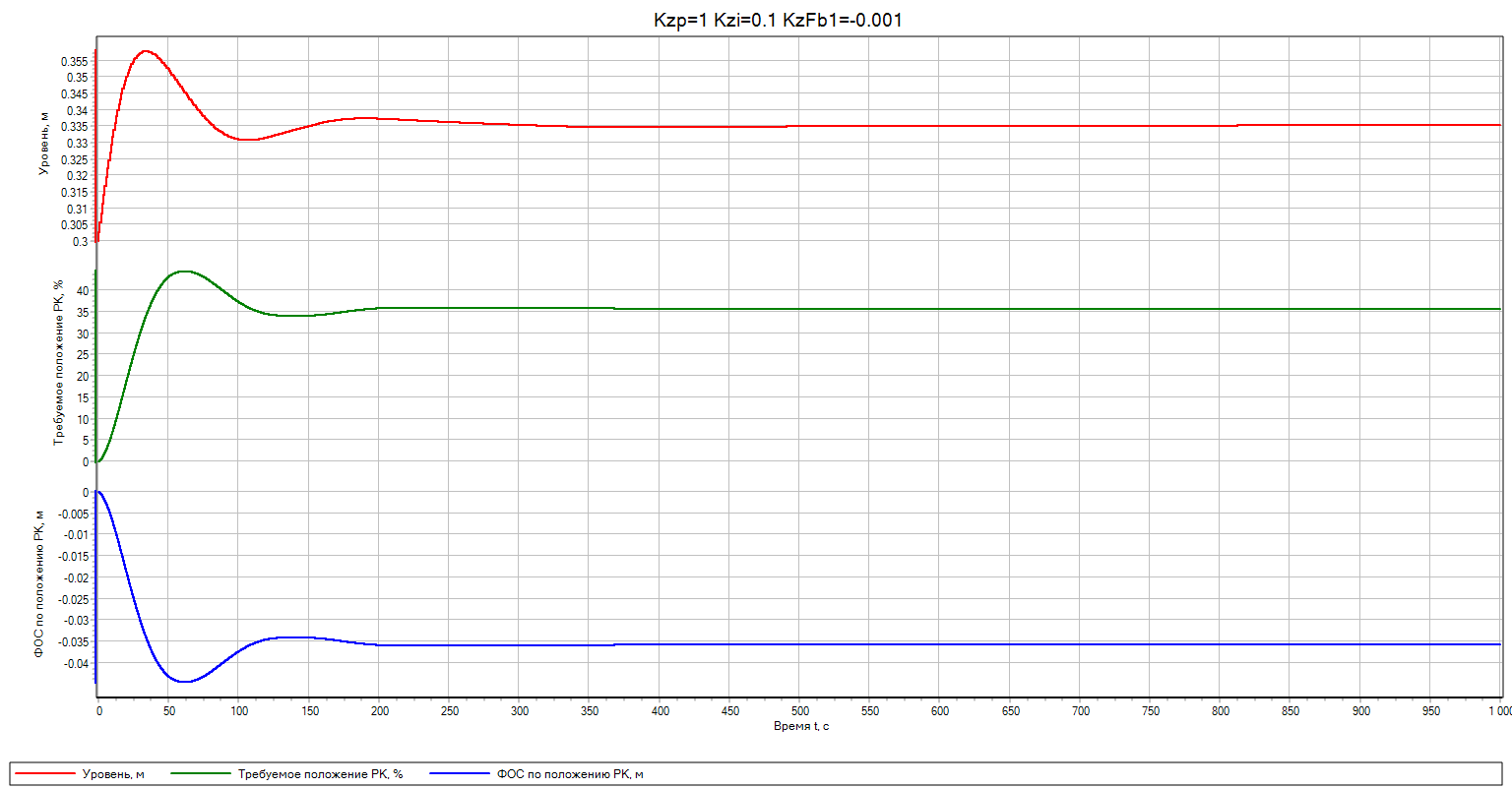
На третьем графике демонстрируется влияние на качество переходного процесса корректирующих обратных связей. В данном случае введена отрицательная обратная связь по положению РК с KzFb1 = -0.001. При этом Kzp=1, Kzi=0.1. На графике видно, что введение обратной связи значительно улучшает качество переходного процесса. Отрицательным моментом при этом является наличие статической ошибки регулирования. Новое устойчивое состояние соответствует не заданному уровню 0.3 м, а уровню 0.3+0.001*35.8 %