Шкив ременной передачи
 |
 |
| Си | |
| в палитре | на схеме |
Блок предназначен для моделирования взаимодействия вращающегося шкива и поступательно движущегося ремня.
Скорость скольжения ремня по шкиву vRel, м/с, определяется по формуле:
- vA и vC – линейные скорости ремня на порте "A" и шкива на порте "C", м/с
- ω – угловая скорость шкива, рад/с
- R – радиус шкива, м
Коэффициент трения скольжения определяется по формуле:
- μ 0 – коэффициент трения с учетом типа ремня
- θ – угол обхвата шкива ремнем, рад
- vth – пороговое значение скорости, используемое для достижения устойчивости численного решения за счет снижения силы трения при скорости скольжения ниже пороговой, м/с
Сила трения Fμ, Н, определяется по формуле:
где сила давления ремня на шкив FN, Н, определяется по формуле:
- FA и FB – силы натяжения ремня на портах "A" и "C" соответственно, Н
- Fmin – минимальная сила давления ремня на шкив
- Fcent – центробежная сила, Н:
где M – масса отрезка ремня, обхватывающего шкив, кг; v – скорость движения ремня, м/с
С увеличением скорости вращения шкива сила давления ремня на шкив снижается из-за центробежной силы, однако она не может опуститься ниже минимальной силы давления, задаваемой в свойствах блока.
- Для плоского ремня:
где μ – коэффициент контактного трения - Для клиновидного ремня:
где φ – угол клина ремня, рад; N – количество ремней
Блок позволяет изменять направление движения концов ремня и знак силы натяжения ремня. Движение концов ремня в одну сторону означает, что скорости концов ремня будут иметь одинаковые знаки. Знак силы натяжения ремня указывает, в каком случае сила на порте "A" будет считаться силой натяжения ремня. В таблице (Таблица 1) схематично отображены способы подключения шкива к другим блокам. Вектор S указывает положительное направление отсчета векторов скоростей v и сил F. Векторы vA и vB отображают совпадение или несовпадение знаков скоростей концов ремня.
| Сила натяжения | |||
|---|---|---|---|
| Положительная | Отрицательная | ||
| Направление движения концов ремня | В одну сторону | 1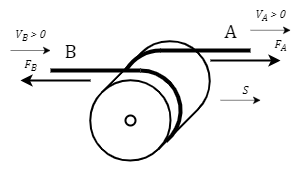 |
2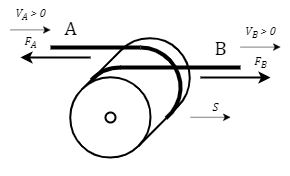 |
| В разные стороны | 3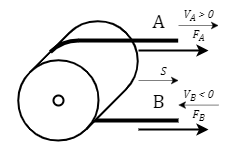 |
4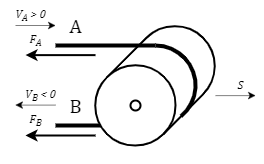 |
|
Блок позволяет задавать совпадение или несовпадение направлений вращения шкива и движения конца A ремня. При совпадении направлений вращения и движения положительная скорость вращения будет соответствовать положительной скорости конца A ремня вне зависимости от взаимного направления движения концов ремня и знака силы натяжения.
Блок позволяет моделировать линейное движение шкива. В этому случае порт "C" принимает профиль линейного движения оси шкива.
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| A | Порт для подключения блоков модели к концу A ремня | Механика поступательная |
| B | Порт для подключения блоков модели к концу B ремня | Механика поступательная |
| R | Порт для подключения блоков модели к валу шкива (rotor) | Механика вращательная |
| C | Порт для подключения блоков модели к оси вала шкива (case). Порт доступен при активированном свойстве "Учитывать линейное движение шкива" | Механика поступательная |
Выходные порты
Блок не имеет выходных портов.
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Ремень | Группа свойств, задающих параметры ремня | |||
| Тип ремня | BType | Позволяет задать тип ремня. Возможные значения: "Плоский", "Клиновидный" | Плоский | Перечисление |
| Число ремней | N | Число ремней. Свойство доступно при выборе типа ремня "Клиновидный" | 3 | Целое |
| Угол клина ремня, град | Fi | Угол клина ремня. Свойство доступно при выборе типа ремня "Клиновидный" | 40 | Вещественное |
| Масса ремня на единицу длины, кг/м | M | Масса одного метра ремня | 0.05 | Вещественное |
| Начальная скорость ремня, м/с | V0 | Начальная скорость ремня от конца А | 0 | Вещественное |
| Начальное положение ремня, м | S0 | Начальное положение ремня от конца А | 0 | Вещественное |
| Шкив | Группа свойств, задающих параметры шкива | |||
| Радиус шкива, м | R | Радиус шкива | 1 | Вещественное |
| Угол обхвата, град | Teta | Угол обхвата | 180 | Вещественное |
| Коэффициент трения подшипников, Н·м·с/рад | B | Коэффициент трения подшипников | 0 | Вещественное |
| Трение | Группа свойств, задающих параметры трения | |||
| Порог скорости, м/с | Vth | Скорость скольжения ремня, ниже которой сила трения снижается для достижения устойчивости численного решения | 1 | Вещественное |
| Коэффициент контактного трения | Mu | Коэффициент контактного трения | 0.5 | Вещественное |
| Минимальная сила давления ремня на шкив | Fmin | Значение минимальной силы давления ремня на шкив, используемое для достижения устойчивости численного решения | 10 | Вещественное |
| Тонкие настройки | Группа свойств, задающих тонкие настройки | |||
| Учитывать линейное движение шкива | Translation | Позволяет учитывать линейное движение шкива | Нет | Двоичное |
| Направление вращения и движения ремня | RotationDir | Позволяет задать направление вращения и движения ремня. Возможные значения: "В одну сторону", "В разные стороны" | В одну сторону | Перечисление |
| Направление движения концов ремня | BeltsDir | Позволяет задать направление движения концов ремня. Возможные значения: "В одну сторону", "В разные стороны" | В одну сторону | Перечисление |
| Сила натяжения ремня | ForceSign | Позволяет задать знак силы натяжения ремня. Возможные значения: "Положительная", "Отрицательная" | Положительная | Перечисление |
Параметры
| Название | Имя | Описание | Тип данных |
|---|---|---|---|
| Скольжение ремня, м/с | V_Rel | Скорость скольжения ремня по шкиву | Вещественное |
| Порт R | Группа параметров, отображающих параметры на порте "R" | ||
| Угловая скорость шкива, рад/с | W | Угловая скорость шкива | Вещественное |
| Момент на шкиве, Н·м | T | Момент на шкиве | Вещественное |
| Порт A | Группа параметров, отображающих параметры на порте "A" | ||
| Линейная скорость ремня, м/с | V_A | Линейная скорость конца A ремня | Вещественное |
| Сила натяжения ремня, Н | F_A | Сила натяжения конца A ремня | Вещественное |
| Порт B | Группа параметров, отображающих параметры на порте "B" | ||
| Линейная скорость ремня, м/с | V_B | Линейная скорость конца B ремня | Вещественное |
| Сила натяжения ремня, Н | F_B | Сила натяжения конца B ремня | Вещественное |
| Порт C | Группа параметров, отображающих параметры на порте "C" | ||
| Линейная скорость шкива, м/с | V_C | Линейная скорость шкива. Значение нулевое, если свойство "Учитывать линейное движение шкива" деактивировано | Вещественное |
| Сила натяжения шкива, Н | F_C | Сила натяжения шкива. Значение нулевое, если свойство "Учитывать линейное движение шкива" деактивировано | Вещественное |