Двигатель синхронный
 |
 |
|
| в палитре | на схеме |
Блок реализует модель синхронного двигателя с постоянным магнитом без успокаивающих обмоток (ДС).
Расчетная схема и дифференциальные уравнения ДС
Расчетная схема ДС аналогична схеме асинхронного электродвигателя с добавлением контура обмотки возбуждения по оси α, на который подано напряжение Uαfp(t). Уравнения равновесия напряжений обмоток ДС имеют следующий вид (в предположении, что статор вращается с частотой, обратной частоте вращения ротора, а ротор неподвижен) (1):
Уравнение равновесия моментов имеет вид (2):
В этих уравнениях: Rc, Rf, Rαp, Rβp – омические сопротивления обмоток статора, возбуждения, контуров пусковой (успокоительной) обмотки;
iαc(t), iβc(t), iαfp(t), iαp(t), iβp(t) – токи обмоток статора и ротора;
Ψαc(t), Ψβc(t), Ψαfp(t), Ψαp(t), Ψβp(t) – потокосцепления обмоток статора и ротора; Ω(t) – частота вращения ротора, pn – число пар полюсов; pf – число фаз питающего напряжения; ω = pnΩ(t) – частота вращения магнитного поля, Tв(t) – электромагнитный момент.
(3), где Lαc, Lβc, Lαfp, Lαp, Lβp – собственные индуктивности контуров статора и ротора, Lαm, Lβm – взаимные индуктивности между обмотками, лежащими по продольной или по поперечной осям. (В этой системе уравнений в приведенных к статору значениях параметров ротора символы ' (прим) опущены).
Запишем выражения для потокосцеплений через основные потоки и потоки рассеяния, т.е. (4):
Получаем (5):
В этом случае схема замещения электрической части машины имеет вид:
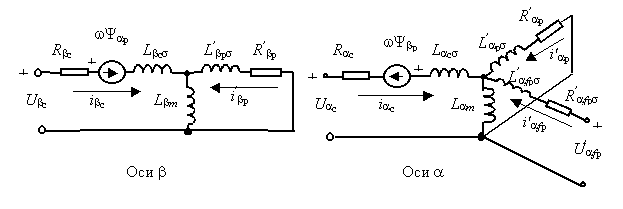
Сгруппируем 1,3,4 и 2,5 уравнения системы (5). Имеем уравнения
Или, если ввести матрицы и векторы
то получаем (6)
В результате имеем (7):

И (8):

и можно записать (9):
Исключив в исходной системе дифференциальных уравнений (1) токи, и введя обозначения:
получаем систему из пяти дифференциальных уравнений первого порядка, описывающую электромагнитные процессы в синхронном двигателе (10):
Уравнения, описывающие механические процессы в двигателе
Рассчитаем токи iαc(t), iβc(t) и введем обозначения:
Тогда получаем (12), (13) и (14):

где J – момент инерции, приведенный к валу двигателя, θ(t) – угол поворота вала двигателя, Mв(t) – электромагнитный момент, Mвозм(t) – возмущающий момент.
Уравнения динамики синхронного двигателя с постоянным магнитом без успокаивающих обмоток
Таким образом, уравнения динамики синхронного двигателя с постоянным магнитом без успокаивающих обмоток имеют вид (15):
Согласно уравнениям (15), переменными состояния ДС являются токи статора iαc(t), iβc(t), угловая скорость вращения ротора Ω(t) и угол поворота ротора θ(t). Входными параметрами являются напряжения на обмотках статора и возмущающий момент.
Блок имеет 3 входных и 3 выходных сигнала.
Входные сигналы:
- Напряжение на обмотке статора Uαc(t) в неподвижной системе координат, В.
- Напряжение на обмотке статора Ubc(t) в неподвижной системе координат, В.
- Возмущающий момент Mв(t), Н·м.
Выходные сигналы:
- Угол поворота ротора q(t), рад.
- Угловая скорость вращения q'(t), рад/с.
- Электромеханический момент на валу ротора Tв(t), Н·м.
Дополнительно на третий выход можно выводить ещё два сигнала:
- Ток в обмотке статора iαc(t), А.
- Ток в обмотке статора iβc(t), А.
Свойства:
- Сопротивление обмоток статора R, Ом;
- Индуктивность d-обмоток статора iαc(t), Гн;
- Индуктивность q-обмоток статора Lβ(t), Гн;
- Магнитный поток от постоянного магнита через обмотки статора I, Вб;
- Момент инерции, приведённый к валу ротора J, кг·м2;
- Число полюсов pn, шт.
- Число фаз питающего напряжения pf, шт.
- Начальный угол поворота ротора q(0), рад.
- Начальная частота вращения ротора q'(0), рад/c.
- Начальный ток в обмотке d статора iα(0), А.
- Начальный ток в обмотке q статора iβ(0), А.
- Дополнительный вывод.
Примечания:
1) Осям α и β соответствуют индексы d и q.
2) Напряжения на обмотках статора Uαc(t) и Uβc(t) являются напряжениями во вращающейся системе координат. Для получения их значений из входных напряжений Uac(t) и Ubc(t) используются соотношения:
