ЭМ - Многозвенный манипулятор
 |
 |
|
| в палитре | на схеме |
Блок реализует математическую модель манипулятора на основе уравнения Лагранжа 2-го рода. Манипулятор рассматривается как система твердых тел, соединенных кинематическими парами пятого класса (вращательными и поступательными), представляющая разомкнутую кинематическую цепь. Первое звено с помощью кинематической пары пятого класса соединено с неподвижной стойкой. Последнее N-e звено — схват. Звенья манипулятора перенумерованы последовательно 1, 2, ..., N. C каждым звеном связана собственная система координат ОiXiYiZi , а с основанием – неподвижная система координат О0X0Y0Z0. Для составления уравнений движения механизма используется система координат Денавита – Хартенберга.
Блок имеет следующие входные и выходные сигналы:
На входные порты блока подаются сигналы:
- Моменты в сочленениях для вращательных звеньев (силы – для поступательных).
- Сила, приложенная в указанной точке.
- Момент, действующий на последнее звено (в проекциях на оси системы координат О0X0Y0Z0).
На выходных портах блока формируются сигналы:
- Положения в сочленениях (обобщенные координаты звеньев).
- Скорости в сочленениях (обобщенные скорости звеньев).
Свойства
- Число звеньев цепи N.
- Типы кинематических пар звеньев (0 — вращательная, 1 — поступательная).
- Начальные значения координат (Qi [рад]* — для вращательной, Di [м] — для поступательной).
- Начальные значения скоростей (dQi/dt[рад/с] —для вращательной, dDi/dt[м/с] — для поступательной).
- Свойства Ai [м].
- Свойство Alphai [рад].
- Di [м] – для вращательной, Qi [рад] – для поступательной.
Моменты инерции для каждого звена :
- Jxxi [кг/м2] (относительно плоскости YiOiZi ).
- Jyyi [кг/м2] (относительно плоскости XiOiZi ).
- Jzzi [кг/м2] (относительно плоскости XiOiYi ).
Центробежный момент инерции для каждого звена:
- Jxzi [кг/м2].
- Jyzi [кг/м2].
- Jxyi [кг/м2].
Статические моменты для каждого звена:
- Sxi [кг/м].
- Syi [кг/м].
- Szi [кг/м].
- Массы звеньев Mi [кг].
- Ориентация вектора g в базовой системе координат [x,y,z].
* Параметры Ai, Alphai, Qi, Di определяются по приведенному ниже алгоритму.
Алгоритм выбора системы координат и определения параметров Ai, Alphai, Qi, Di.
Для определения параметров манипулятора в системе координат Денавита-Хартенберга необходимо:
- Определить базовые координаты [X0 Y0 Z0] так, чтобы ось Z0 совпадала с осью первого сочленения.
- Направить все оси Zi по осям поступательного движения или вращения i - го звена относительно (i-1) - го звена.
- Задать начало i-й системы координат в точках пересечения оси Zi с общей нормалью к осям Zi и Zi-l.
- Задать оси Xi в каждом i-м сочленении вдоль общей нормали к осям Zi-1 и Zi.
- Задать оси Yi, так чтобы образовать правые тройки координат.
- Найти Di как расстояние от начала координат (i-1)-й системы координат до точки пересечения осей Zi-l и Xi, измеренного в направлении оси Zi-l. Если i-е сочленение является поступательным, то Di является обобщенной координатой.
- Найти Ai как расстояние от начала (i-1)-й системы координат до точки пересечения осей Zi и Xi, измеренного в направлении оси Xi.
- Найти Qi как угол поворота от оси Xi-l до оси Xi вокруг оси Zi-l.
- Найти Alphai как угол поворота от оси Zi-l до оси Zi относительно оси Xi.
Пример заполнения диалогового окна:
На рисунке (Рисунок 1) показана схема трехзвенного манипулятора.
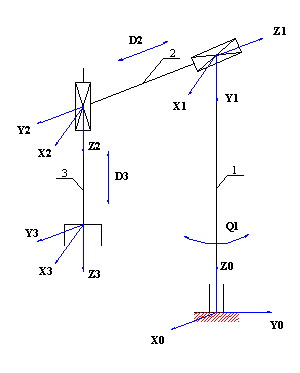
| N звена/Свойство | 1 | 2 | 3 |
| Длина, м | 1 | 0.8 | 1.6 |
| Масса, кг | 50 | 20 | 10 |
| Момент инерции Jxx, кг/м2 | 0 | 0 | 0 |
| Момент инерции Jyy, кг/м2 | 16.7 | 4.27 | 0 |
| Момент инерции Jzz, кг/м2 | 0 | 0 | 8.53 |
| Момент инерции Jxz, кг/м2 | 0 | 0 | 0 |
| Момент инерции Jyz, кг/м2 | 0 | 0 | 0 |
| Момент инерции Jxy, кг/м2 | 0 | 0 | 0 |
| Статический момент Sx, кг/м | 0 | 0 | 0 |
| Статический момент Sy, кг/м | 25 | 8 | 0 |
| Статический момент Sz, кг/м | 0 | 0 | -8 |
| Свойство A | 0 | 0 | 0 |
| Свойство D | 1 | D2 | D3 |
| Свойство Q | Q1 | 0 | 0 |
| Свойство Alpha | -pi/2 | -pi/2 | 0 |
D2, D3 и Q1 являются обобщенными координатами.
Вектор g направлен вниз параллельно оси Z0. Начальные скорости равны 0. Начальные координаты равны соответственно 1.57 рад, 0.2 м, 0 м.