Двигатель асинхронный
 |
 |
|
| в палитре | на схеме |
Блок реализует математическую модель асинхронного двигателя (ДА).
В системах автоматического регулирования применяют как трехфазные, так и двухфазные асинхронные электродвигатели. Трехфазные ДА являются двигателями общепромышленного применения, двухфазные ДА – это специальные двигатели, получившие название исполнительных асинхронных двигателей (ИДА).
Расчетная схема и дифференциальные уравнения
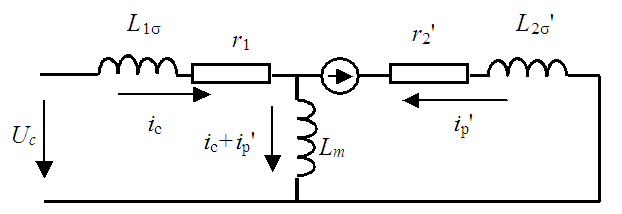
Как двухфазные, так и трехфазные ДА принято описывать системой дифференциальных уравнений в неподвижной системе координат αc, βc. При этом трехфазные машины приводят к двухфазным. Расчетная схема ДА представлена на рисунках (Рисунок 1 и Рисунок 2):
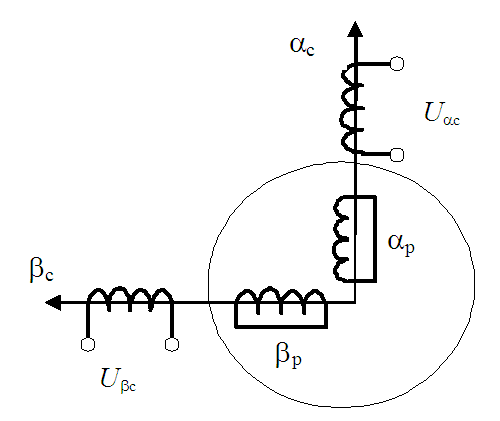
Система дифференциальных уравнении ДА для неподвижной системы координат, связанной со статором, и вращающейся системы координат, связанной с ротором, имеет вид:
где r1, r2 – активные сопротивления обмоток статора и ротора;
Ψαc(t), Ψβc(t), Ψαp(t), Ψβp(t) – потокосцепления статора и ротора по осям α и β соответственно.
ЭДС вращения, вводимые в уравнения обмоток ротора, определяются как
Потокосцепления обмоток машины равны:
где L1, L2 – коэффициенты самоиндукции обмоток статора и ротора, Lm – коэффициент взаимоиндукции между контурами статора и ротора при совпадении их осей.
Решая систему линейных уравнений (*), получаем:
Уравнение равновесия моментов:

s - коэффициент скольжения вектора скорости вращения ротора относительно вектора вращающегося магнитного поля.
При записи через потокосцепления и токи, электромагнитный момент для двухфазного ДА равен:
Электромагнитный момент для трехфазного ДА равен
Уравнения состояния асинхронного электродвигателя
Результирующий магнитный поток, созданный какой-либо обмоткой обобщенной машины принято подразделять на основной магнитный поток и поток рассеяния, например, поток, созданный обмоткой статора, равен Ф1 = Ф10 + Ф1σ, где Ф10 – основной магнитный поток, Ф1σ – поток рассеяния. Соответственно индуктивности обмоток можно разделить на основные и индуктивности рассеяния:
L1 = L10 + L1σ', L2' = L20' + L2σ' (9)
и индуктивные сопротивления:
x1 = ω1L1, x1σ = ω1L1σ, x2' = ω1L2', x2σ' = ω1L2σ'
Введем равенство:
L10 = L20' = L12' = L21' = Lm или x10 = x20' = x12' = x21' = xm
где Lm – индуктивность цепи намагничивания;
xm – индуктивное сопротивление цепи намагничивания;
L1σ – индуктивность рассеяния обмотки статора;
L2σ' – приведенная индуктивность рассеяния обмотки ротора;
L10 = Lm – индуктивность основного потока обмотки статора;
L10 = Lm – приведенная индуктивность основного потока обмотки ротора;
L12' = L21' = Lm – приведенные взаимоиндуктивности обмоток.
Систему уравнений ДА (1) – (7) запишем в форме Коши, одновременно заменяя токи обмоток через функции потокосцеплений, а индуктивности обмоток через основные и индуктивности рассеяния. Из системы уравнений (3) находим:
Заменяя токи в выражении (7) получаем
где pf – число фаз питающего напряжения.
Подставляем полученные значения токов и момента в уравнения (1) и (4), обозначая D = L1σL2σ + L1σLm + L2σLm, имеем
Уравнения (12) можно рассматривать как уравнения состояния ДА. В качестве переменных состояния здесь выступают проекции потокосцеплений на ортогональные оси, угловая скорость вращения ротора и угол поворота ротора. Внешними воздействиями на двигатель являются напряжения статора (образующие вектор управления) и момент сил сопротивления.
Блок имеет 3 входных и 3 выходных сигнала.
Входные сигналы:
- Напряжение на обмотке статора Uαc(t) в неподвижной системе координат, В.
- Напряжение на обмотке статора Uβc(t) в неподвижной системе координат, В.
- Возмущающий момент Мвозм(t), Н·м.
Выходные сигналы:
- Угол поворота вала q(t), рад.
- Угловая скорость (частота) вращения q'(t), рад/с.
- Электромеханический момент на валу ротора двигателя Tв(t), Н·м;
Дополнительно на третий выход можно выводить:
- Ток в обмотке статора iαc(t), А.
- Ток в обмотке статора iβc(t), А.
Свойства
-
Сопротивление цепи статора R1, Ом;
-
Сопротивление цепи ротора R2, Ом;
-
Индуктивность цепи статора L1, Гн;
-
Индуктивность цепи ротора L2, Гн;
-
Взаимная индуктивность Lm, Гн;
-
Момент инерции, приведённый к валу ротора JΣ, кг·м2.
-
Число полюсов pn, шт.
-
Число фаз питающего напряжения Pf, шт.
-
Начальный угол поворота ротора q(0), рад.
-
Начальная частота вращения ротора q'(0), рад/c.
-
Начальное потокосцепление в обмотке q статора, В·с.
-
Начальное потокосцепление в обмотке q ротора, В·с.
-
Начальное потокосцепление в обмотке d статора, В·с.
-
Начальное потокосцепление в обмотке d ротора, В·с.
-
Дополнительный вывод.