Переменные состояния
 |
 |
| Векторизован
| |
| в палитре | на схеме |
Описание
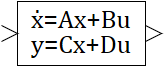
Блок реализует описание многомерной линейной динамической системы, записанной в матричной форме:
где A, B, C, D – матрицы: системы, входа, выхода и обхода, соответственно; x(t)– вектор переменных состояния (размерностью [Nx]); u(t) – вектор входа (размерностью [Nu]); y(t) – вектор выхода, (размерностью [Ny]).
Размерность матрицы A - [Nx×Nx].
Размерность матрицы B - [Nu×Nx].
Размерность матрицы C - [Nx×Ny].
Размерность матрицы D - [Nu×Ny].
1-е число в квадратных скобках – количество столбцов, 2-е число – количество строк. Обязательное условие: Nx≥Ny. Вход и выход блока – векторные сигналы (размерностью Nu и Ny, соответственно).
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| inport | Входной сигнал, размерностью Nu. | Математическая |
Выходные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| outport | Выходной преобразованный сигнал, размерностью Ny. | Математическая |
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Число переменных состояния | xc | Размерность Nx квадратной матрицы A. | 2 | Целое |
| Число входных воздействий | uc | Размерность входа Nu. | 1 | Целое |
| Число выходов | yc | Размерность выхода Ny. | 1 | Целое |
| Матрица A(Nx*Nx) | A | Квадратная матрица системы. | [[-1 , 1];[-1 , 0]] | Матрица |
| Матрица B(Nu*Nx) | B | Матрица входа. | [[1 , 0]] | Матрица |
| Матрица C(Nx*Ny) | C | Матрица выхода. | [[0];[1]] | Матрица |
| Матрица D(Nu*Ny) | D | Матрица обхода. | [[0]] | Матрица |
| Начальные условия (Nx) | y0 | Вектор начальных условий, размерностью Nx. | [0 , 0] | Массив |