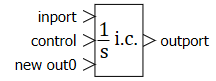
Блок реализует интегрирование входного сигнала (сигналов):
где
xi(t) – элементы вектора входного сигнала,
yi(t) – элементы вектора выходного сигнала, t1 и
t2 – времена переключения начальных условий. При t =
t1 происходит установление новых начальных условий и при
t1 < t < t2 выполняется интегрирование
сигналов входного вектора с этими новыми начальными условиями. При t =
t2 происходит очередное изменение начальных условий и при t >
t2 выполняется очередной этап интегрирования с новыми начальными условиями
вплоть до нового очередного изменения начальных условий. Переключение начальных условий
производится только при изменении управляющего сигнала с одного значения, например, с 1 на
другое, например, 2, или наоборот, с 2 на 1. Размерности интегрируемого сигнала и сигнала
начальных условий должны быть одинаковыми, например, если вектор входа – "трехжильный", то и
сигнал начальных условий тоже "трехжильный".
По умолчанию данный блок реализует интегрирование скалярного входного сигнала.
Рекомендуется (хотя и не обязательно) использовать значения управляющих сигналов 0 и
1, поскольку их формирование легко реализуется типовыми логическими блоками.