Груз на пружине
Описание демо-примера
Расположение
SimInTech\Demo\Механика 3D\Груз на пружине\Груз на пружине.prt
Описание
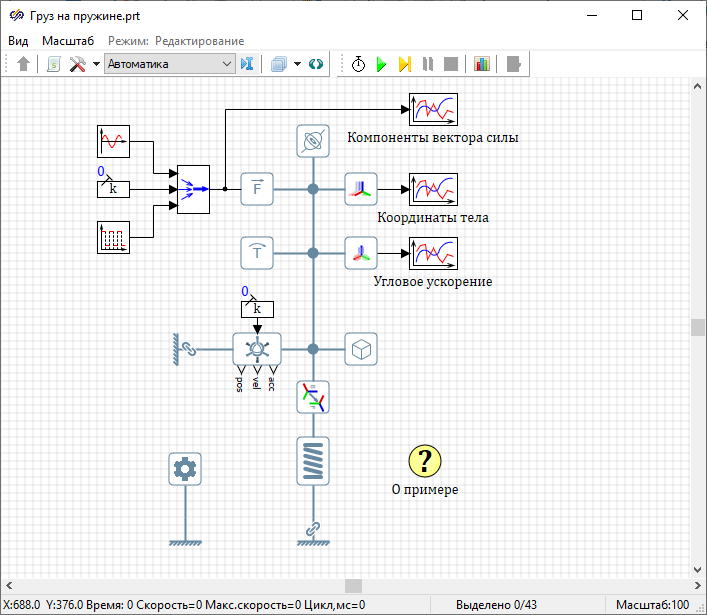
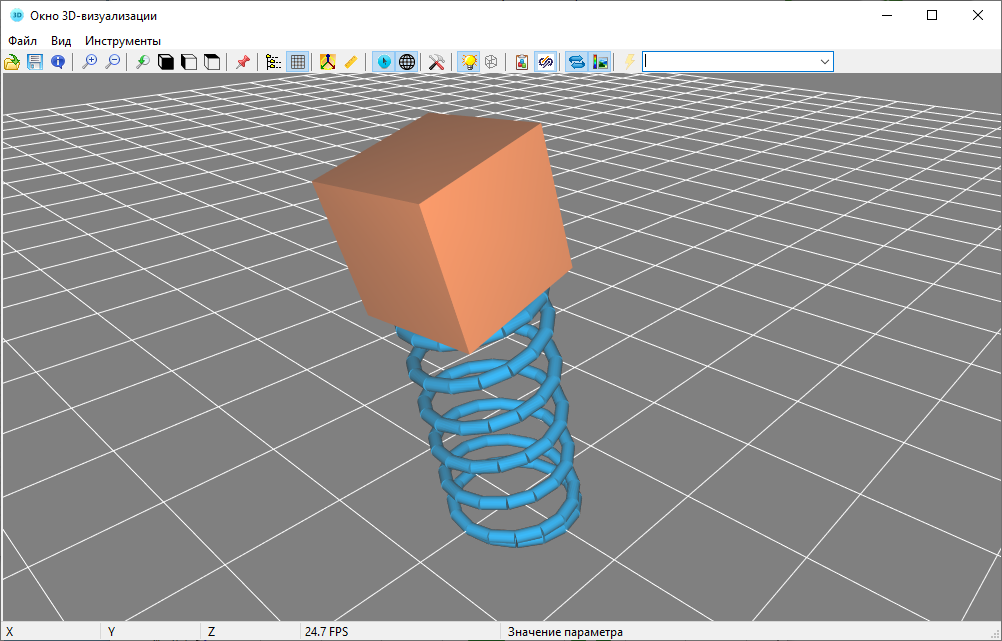
Данный проект демонстрирует возможности библиотеки Механика 3D по моделированию динамики твердых тел под действием вязко-упругих сил.
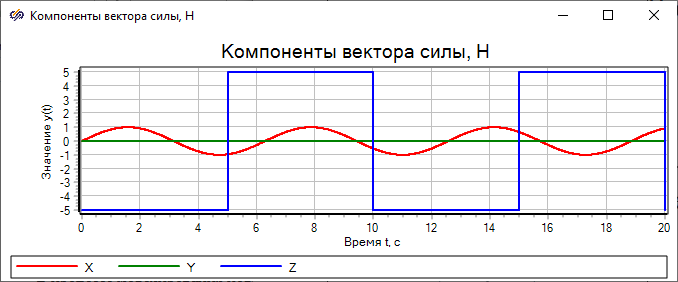
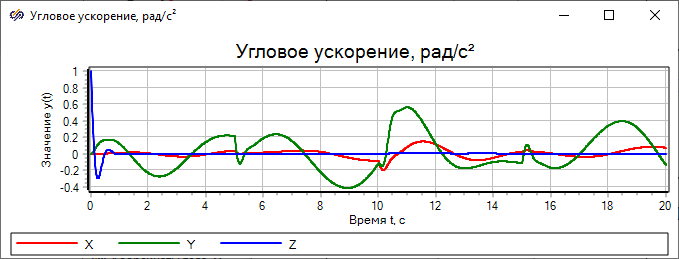
С помощью блоков Заделка, Шестиподвижная КП и Масс-инерционные характеристики" сформирована модель твердого тела, свободно двигающегося в пространстве. Блок Пространственный вязко-упругий элемент реализует модель пружины, учитывающей поперечную деформацию и изгиб. Блок Преобразование координат указывает точку крепления пружины к твердому телу. Для уменьшения количества линий связи на схеме кинематическая пара и пружина подключены к заделке с помощью блоков Ссылка на заделку. Блоки Внешняя сила и Внешний момент позволяют задать действие внешней силы и внешнего момента на твердое тело. Блоки Датчик движения" и Датчик ускорения позволяют считать геометрическое положение и угловое ускорение твердого тела. На графиках отображаются компоненты вектора внешней силы, координаты и вектор углового ускорения твердого тела.