Маятники
Описание демо-примера
Расположение
SimInTech\Demo\Механика 3D\Маятники\Маятники.prt
Описание
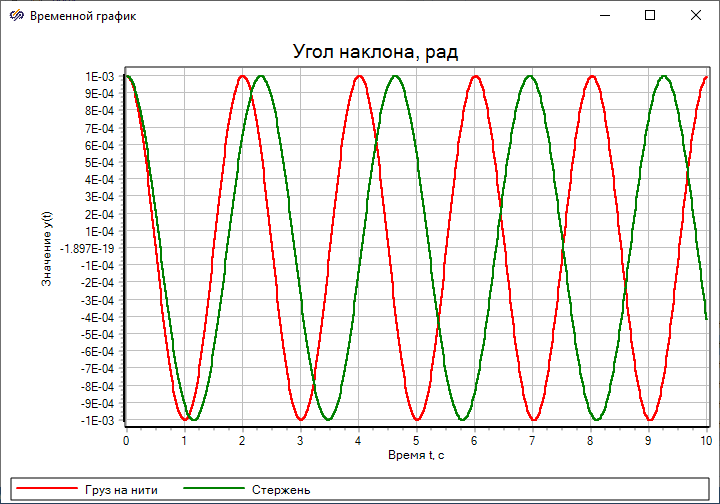
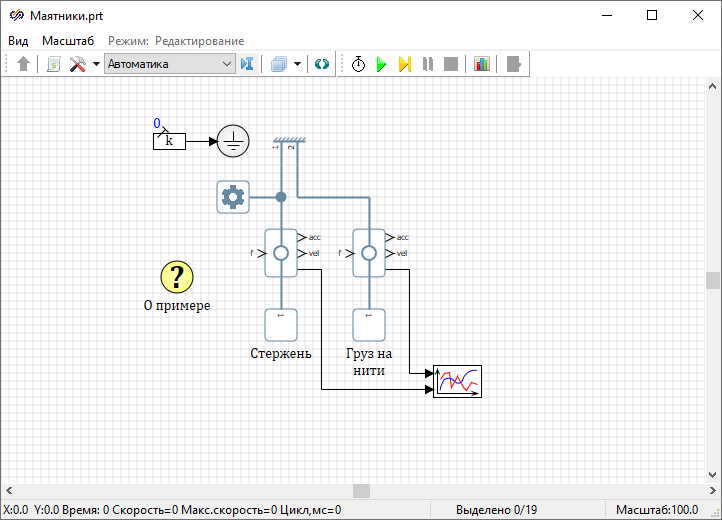
Данный проект демонстрирует возможности библиотеки Механика 3D по моделированию динамики механизмов на примере математического и физического маятника.
С помощью блоков Заделка, Звено и Вращательная КП сформированы модели математического маятника (груз на нити) и физического маятника (стержень). Отличие моделей состоит в инерционных характеристиках звеньев: у груза на нити нулевые моменты инерции.
Поскольку начальные отклонения маятников составляют 0.001 рад, допустимо считать колебания маятников малыми. Период малых колебаний математического маятника вычисляется по формуле:
где L - расстояние от оси вращения до центра масс маятника, g - ускорение свободного падения.
Период малых колебаний физического маятника вычисляется по формуле:
где J - осевой момент инерции стержня относительно оси, проходящей через центр масс, m - масса стержня. Выражение, стоящее в числителе, определяет момент инерции стержня относительно оси вращения.
- L = 1 м;
- g = 9.81 м/с2;
- J = 0.333 кг·м2;
- m = 1 кг.
Период колебаний математического маятника равен:
Период колебаний физического маятника равен: