Кривошипно-ползунный механизм
Описание демо-примера
Расположение
SimInTech\Demo\Механика 3D\Кривошипно-ползунный механизм\Кривошипно-ползунный механизм.prt
Описание
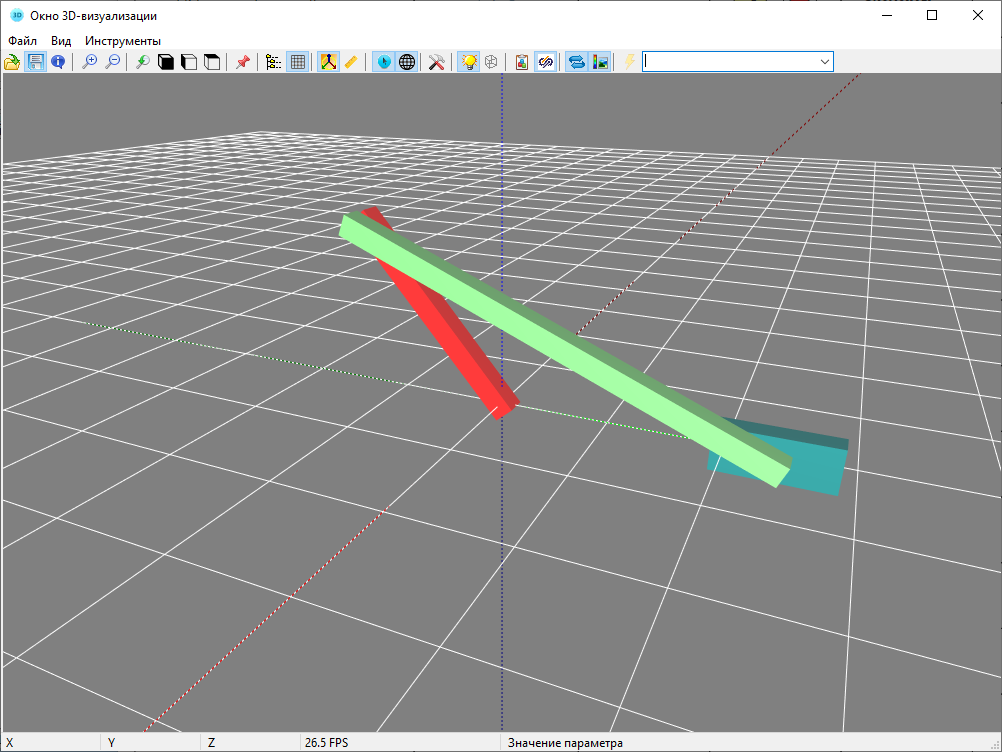
Данный проект демонстрирует возможности библиотеки Механика 3D по моделированию динамики механизмов с замкнутыми кинематическими цепями и решению обратной задачи динамики.
С помощью блоков Заделка, Звено, " Вращательная КП и Поступательная КП сформирована модель кривошипно-ползунного механизма. Для уменьшения количества линий связи на схеме кинематическая пара ползуна подключена к заделке с помощью блока Ссылка на заделку.
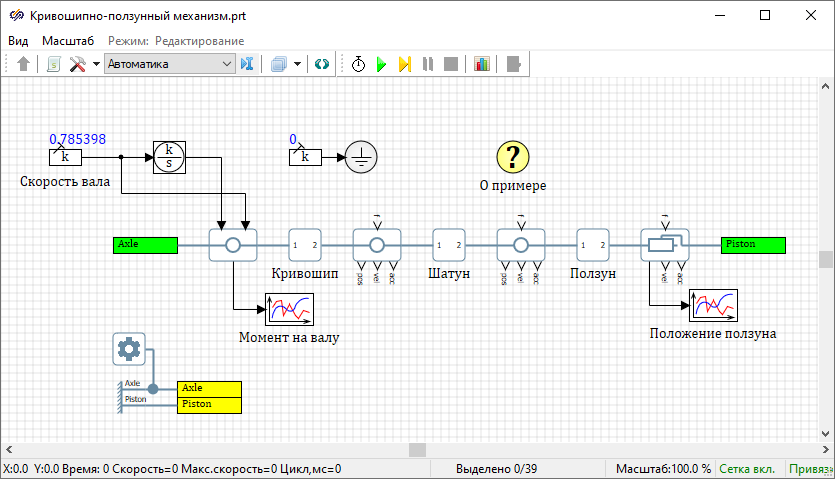
Для вращательной кинематической пары кривошипа решается обратная задача динамики: определяется момент в сочленении, необходимый для обеспечения движения по заданному закону движения, в данном случае для вращения с постоянной скоростью. Обобщенные положение и скорость задаются через входные порты, обобщенное ускорение вычисляется автоматически внутри блока кинематической пары.