Прецессия гироскопа
Описание демо-примера
Расположение
SimInTech\Demo\Механика 3D\Прецессия гироскопа\Прецессия гироскопа.prt
Описание
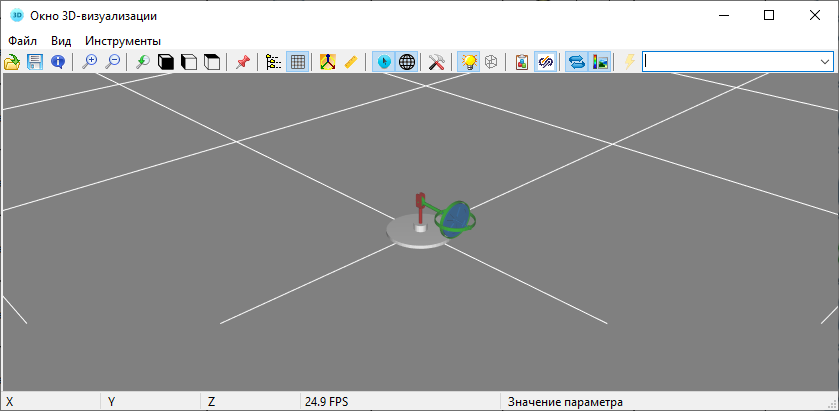
Данный проект демонстрирует возможности библиотеки Механика 3D по моделированию прецессии гироскопа под действием момента внешних сил, а также подключение блоков библиотеки Механика 3D к блокам библиотеки Механика".
- неподвижное основание;
- стойка, вращающаяся вокруг вертикальной оси;
- плечо, вращающееся относительно стойки вокруг горизонтальной оси;
- диск, вращающийся относительно плеча вокруг горизонтальной оси.
Масс-инерционные характеристики каждого звена заданы внутри блоков Звено, которые являются субмоделями. Начальная скорость вращения диска относительно плеча задана в блоке Вращательная КП", соединяющем эти два звена.
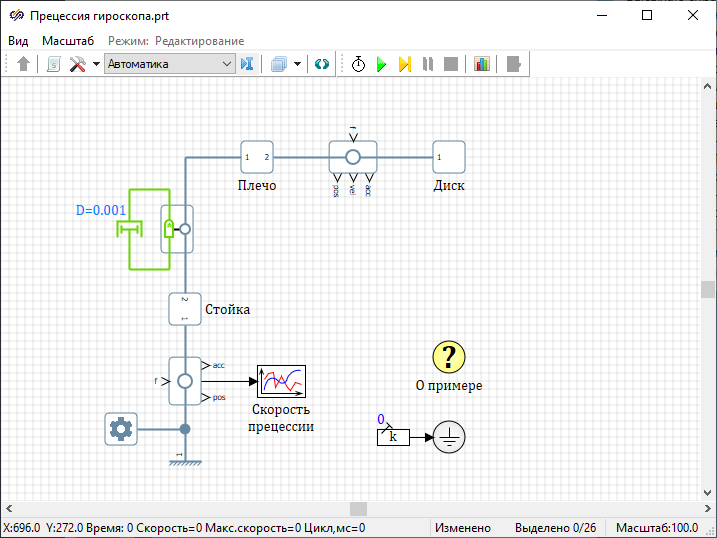
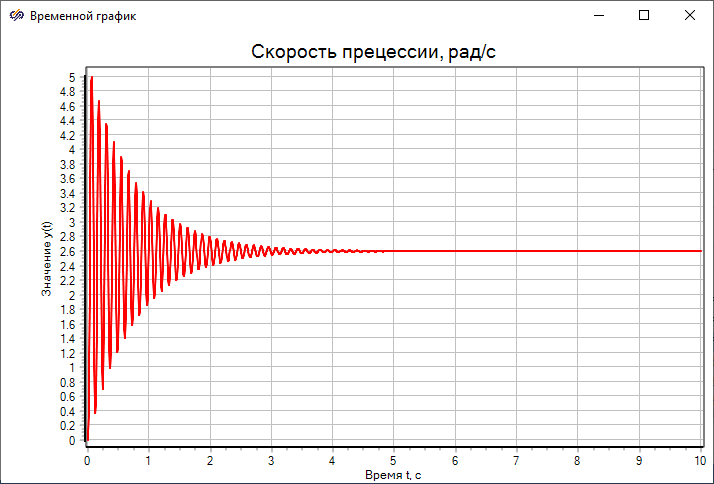
В идеальной модели без трения скорость прецессии и угол наклона плеча будут изменяться в виде периодических колебаний. Для затухания колебаний в шарнир наклона плеча добавлено вязкое трение - блок Вращательный демпфер из библиотеки Механика.
Аналитически скорость прецессии вычисляется следующим образом:
где: ωprec - скорость прецессии, рад/с; T - момент внешних сил, Н·м; J - момент инерции диска относительно оси вращения, кг·м2; ω - относительная скорость вращения диска, рад/с.
Момент внешних сил рассчитывается как:
где: l1 - плечо вектора силы тяжести диска, м; m1 - масса диска, кг; g - ускорение свободного падения, м/с2; l2 - плечо вектора силы тяжести плеча, м; m2 - масса плеча, кг.
- l1 = 0.07 м;
- m1 = 0.06 кг;
- g = 9.81 м/с2;
- l2 = 0.043 м;
- m2 = 0.0269 кг;
- J = 2.0169E-5 кг·м2;
- ω = 1000 рад/с.
Аналитическое значение скорости прецессии равно:
По результатам моделирования скорость прецессии равна 2.5981 рад/с. Расхождение вызвано тем, что аналитический расчет описывает стационарный режим вращения гироскопа и не учитывает переходный процесс увеличения скорости прецессии и наклона плеча на 0.05 рад. При задании аналитически рассчитанной скорости прецессии в качестве начальной скорости вращения стойки модель будет поддерживать эту скорость неизменной.