Дисковая муфта
 |
 |
| Си | |
| в палитре | на схеме |
Блок предназначен для моделирования дисковой муфты, соединяющей два вращающихся тела. Блок позволяет моделировать пакет фрикционных дисков с произвольным количеством поверхностей соприкосновения. Передача крутящего момента может осуществляться в обе стороны (двунаправленная) или в заданном направлении (от одного порта к другому). Во втором случае крутящий момент будет передаваться, только если угловая скорость на передающем порте больше или равна угловой скорости на принимающем порте.
В блоке используется модель контактного трения скольжения двух поверхностей под действием прижимающей силы. Относительная скорость скольжения ω, рад/с, определяется по формуле:
где ωB, ωF – угловые скорости на портах "B" и "F", соответственно, рад/с.
Задание кривой трения возможно двумя способами: кривая трения Штрибека и таблично заданная кривая.
Кривая Штрибека
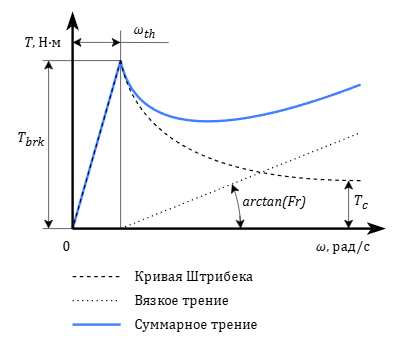
Момент трения определяется по формуле:
- TB и TF – крутящие моменты, подаваемые на порты "B" и "F" соответственно, Н·м
- Tbrk – момент трения страгивания, Н·м
- Tc – момент кулоновского (сухого) трения, Н·м
- ωth – угловая скорость страгивания, рад/с
- C – коэффициент затухания, с/рад
- Fr – коэффициент вязкого трения, Н·м·с/рад
Моменты трения Tbrk и Tc рассчитываются в зависимости от значения прижимной силы по формулам:
- P – прижимающая сила, Н
- N – количество поверхностей соприкосновения
- D – коэффициент степени износа поверхностей трения от 1 до 0, где 1 соответствует нулевому износу.
- μ – коэффициент трения страгивания
- μs – коэффициент кулоновского трения
- Reff – эффективный радиус диска, м, который задается в явном виде или
рассчитывается по формуле:
где Ro – внешний (outer) радиус диска, м; Ri – внутренний (inner) радиус диска, м.
Табличная кривая
При использовании данного способа коэффициент трения определяется при помощи интерполяции заданной таблицы. При выходе скорости скольжения за пределы таблицы экстраполяция не осуществляется.
Крутящий момент трения определяется по формуле:
где μ(|ω|) – значение коэффициента трения, полученное в результате интерполяции.
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| N | Количество поверхностей соприкосновения | Математическая |
| B | Порт для подключения ведущего вала (base) | Механика вращательная |
| F | Порт для подключения ведомого вала (following) | Механика вращательная |
Выходные порты
Блок не имеет выходных портов.
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Тип передачи момента | Dir | Тип передачи момента. Возможные значения: "Двухнаправленная", "От порта B к порту F", "От порта F к порту B" | Двухнаправленная | Перечисление |
| Трение | Группа свойств, задающих параметры трения | |||
| Модель трения | MType | Тип модели трения. Возможные значения: "Кривая Штрибека", "Табличная" | Кривая Штрибека | Перечисление |
| Угловая скорость страгивания, рад/с | Wth | Пороговое значение угловой скорости, ниже которой значение силы трения снижается для достижения устойчивости численного решения. Свойство доступно при выборе способа задания модели трения "Кривая Штрибека" | 0.01 | Вещественное |
| Коэффициент трения страгивания | Mu | Коэффициент трения страгивания. Свойство доступно при выборе способа задания модели трения "Кривая Штрибека" | 0.3 | Вещественное |
| Коэффициент кулоновского трения | Mus | Коэффициент кулоновского трения. Свойство доступно при выборе способа задания модели трения "Кривая Штрибека" | 0.15 | Вещественное |
| Коэффициент затухания, с/рад | C | Коэффициент затухания. Свойство доступно при выборе способа задания модели трения "Кривая Штрибека" | 1 | Вещественное |
| Коэффициент вязкого трения, Н·м·с/рад | Fr | Коэффициент вязкого трения. Свойство доступно при выборе способа задания модели трения "Кривая Штрибека" | 0 | Вещественное |
| Число поверхностей соприкосновения | N | Число поверхностей соприкосновения | 1 | Целое |
| Коэффициент износа | D | Коэффициент износа в диапазоне [0 , 1] | 1 | Вещественное |
| Массив скоростей, рад/с | Wx | Массив значений скорости скольжения. Свойство доступно при выборе способа задания модели трения "Табличная" | [0 , 0.1 , 0.2 , 0.3 , 0.4 , 0.5 , 1 , 2 , 5] | Массив |
| Массив коэффициентов трения | My | Массив значений коэффициентов трения. Свойство доступно при выборе способа задания модели трения "Табличная" | [0.29 , 0.28 , 0.26 , 0.22 , 0.21 , 0.2 , 0.2 , 0.19 , 0.19] | Массив |
| Максимальная прижимная сила, Н | Pth | Максимальная прижимающая сила, ограничивающая значение задаваемой прижимающей силы | 200 | Вещественное |
| Геометрия | Группа свойств, задающих геометрические параметры поверхностей | |||
| Способ задания геометрии диска | R_type | Способ задания геометрии диска. Возможные значения: "Внешний и внутренний радиусы", "Эффективный радиус" | Внешний и внутренний радиусы | Перечисление |
| Внешний радиус диска, м | Ro | Внешний радиус диска. Свойство доступно при выборе способа задания геометрии диска "Внешний и внутренний радиусы" | 15 | Вещественное |
| Внутренний радиус диска, м | Ri | Внутренний радиус диска. Свойство доступно при выборе способа задания геометрии диска "Внешний и внутренний радиусы" | 0 | Вещественное |
| Эффективный радиус диска, м | Reff | Эффективный радиус диска. Изменение свойства возможно только при выборе способа задания геометрии диска "Эффективный радиус", иначе свойство отображается в режиме "Только для чтения" и носит справочный характер | 10 | Вещественное |
Параметры
| Название | Имя | Описание | Тип данных |
|---|---|---|---|
| Момент, Н·м | T | Момент, передаваемый на порт "F" | Вещественное |
| Разность угловых скоростей, рад/с | W | Относительная угловая скорость | Вещественное |
Примеры
Литература
- Richard Stribeck: Die wesentlichen Eigenschaften der Gleit- und Rollenlager, Z. Verein. Deut. Ing. Vol. 46 Seite 38ff. 1341–1348 (1902).