Кулачковая муфта
 |
 |
| Си | |
| в палитре | на схеме |
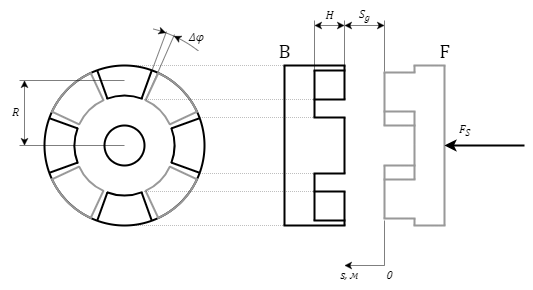
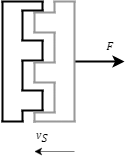
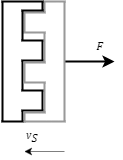
На схеме изображены полумуфты "B" и "F" и сила, которая действует со стороны механизма управления на полумуфту FS. Сила, с которой полумуфта действует на механизм управления определяется по формуле:
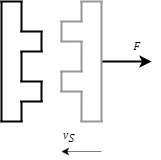
Сближение полумуфт характеризуется силой трения F, Н, приложенной к механизму управления, и нулевым крутящим моментом:
- BS – коэффициент трения механизма управления, Н·с/м
- vS – скорость движения механизма управления, м/с
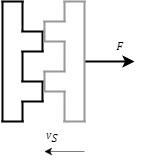
Соприкосновение верхушек зубьев характеризуется силой давления F, Н, приложенной к механизму управления, и крутящим моментом трения T, Н·м, приложенным к полумуфтам:
- SS – положение механизма управления, м
- Sg – зазор при полном расцеплении, м
- KS – коэффициент жесткости при упоре, Н/м
- DS – коэффициент демпфирования при упоре, Н·с/м
- μ – коэффициент трения между зубьями
- ω – относительная угловая скорость полумуфт, рад/с
- ωth – пороговое значение угловой скорости, используемое для достижения устойчивости численного решения за счет снижения силы трения при скорости скольжения ниже пороговой, рад/с
Сближение полумуфт характеризуется силой трения F, Н, приложенной к механизму управления, и нулевым крутящим моментом:
Зацепление полумуфт характеризуется силой трения F, Н, приложенной к механизму управления, и крутящим моментом сил давления зубьев T, Н·м, приложенным к полумуфтам:
- R – средний радиус зубьев (расстояние до оси вращения), м
- vth – пороговое значение линейной скорости, используемое для достижения устойчивости численного решения за счет снижения силы трения при скорости скольжения ниже пороговой, м/с
- K – коэффициент жесткости зубьев, Н·м/рад
- D – коэффициент демпфирования зубьев, Н·м·с/рад
- φ – угловая деформация зубьев (разность угловых положений полумуфт), рад
- ω – относительная угловая скорость полумуфт, рад/с
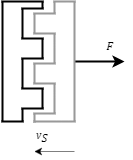
Соприкосновение верхушек зубьев с основаниями пазов характеризуется силой давления F, Н, приложенной к механизму управления:
где H – высота зубьев, м
Соприкосновение боковых поверхностей зубьев может произойти как до, так и после соприкосновения верхушек зубьев с основаниями пазов в зависимости свойств муфты и подключенных к ней блоков.
Опционально при полном расцеплении муфты (при нулевом положении механизма управления) возможно моделирование соприкосновения механизма управления с упором, не позволяющим увеличить зазор более чем на величину Sg.
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| S | Порт для подключения механизма управления | Механика поступательная |
| B | Порт для подключения ведущего вала (base) | Механика вращательная |
| F | Порт для подключения ведомого вала (following) | Механика вращательная |
Выходные порты
Блок не имеет выходных портов.
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Зубья | Группа свойств, задающих параметры зубьев | |||
| Число зубьев | N | Число зубьев | 6 | Целое |
| Угловой зазор между зубьями, град | dFi | Угловой зазор между зубьями | 10 | Вещественное |
| Высота зубьев, м | H | Высота зубьев | 0.01 | Вещественное |
| Средний радиус зубьев, м | R | Средний радиус зубьев | 0.05 | Вещественное |
| Коэффициент жесткости зубьев, Н·м/рад | K | Коэффициент жесткости зубьев | 1000000 | Вещественное |
| Коэффициент демпфирования зубьев, Н·м·с/рад | D | Коэффициент демпфирования зубьев | 1000 | Вещественное |
| Коэффициент трения между зубьями | Mu | Коэффициент трения между зубьями | 0.05 | Вещественное |
| Пороговая угловая скорость, рад/c | Wth | Коэффициент трения между зубьями | 0.001 | Вещественное |
| Механизм управления | Группа свойств, задающих параметры механизма управления | |||
| Минимальное перекрытие зубьев для зацепления, м | Smin | Минимальное перекрытие зубьев для зацепления | 0.003 | Вещественное |
| Зазор при полном расцеплении, м | Sg | Зазор при полном расцеплении | 0.003 | Вещественное |
| Максимальная относительная скорость, рад/с | Wmax |
Относительная скорость вращения полумуфт, при которой становится невозможным зацепление |
10 | Вещественное |
| Упор МУ при полном расцеплении | StopType | Позволяет указать необходимость моделировать упор механизма управления при полном расцеплении | Нет | Двоичное |
| Коэффициент жесткости при упоре, Н/м | Ks | Коэффициент жесткости при упоре | 1000000 | Вещественное |
| Коэффициент демпфирования при упоре, Н·с/м | Ds | Коэффициент демпфирования при упоре | 1000 | Вещественное |
| Коэффициент трения МУ, Н·с/м | Bs | Коэффициент трения механизма управления | 1 | Вещественное |
| Пороговая скорость МУ, м/с | Vth | Пороговая скорость механизма управления | 0.001 | Вещественное |
Параметры
| Название | Имя | Описание | Тип данных |
|---|---|---|---|
| Механизм управления | Группа параметров, отображающих параметры механизма управления | ||
| Положение, м | S | Положение механизма управления | Вещественное |
| Сила, Н | F |
Сила, действующая со стороны данного блока на блоки, подключенные к порту "S" |
Вещественное |
| Полумуфты | Группа параметров, отображающих параметры полумуфт | ||
| Момент, Н·м | T | Момент, передаваемый между полумуфтами | Вещественное |
| Разность угловых скоростей, рад/с | W | Относительная угловая скорость | Вещественное |
| Полумуфты зацеплены | IsLocked | Двоичный флаг, указывающий на то, что полумуфты находятся в состоянии зацепления | Двоичное |