ЭЦД2 - Генератор синхронный (1 л. сх.)
 |
 |
|
| в палитре | на схеме |
Назначение
Блок предназначен для моделирования синхронного генератора.
Описание
В основе модели генератора лежат уравнения Парка-Горева, позволяющие рассчитывать электромеханические и электромагнитные переходные процессы. Расчет выполняется на основе уравнений для мгновенных значений токов и напряжений.
Общая структура модели синхронного генератора представлена на рисунке 1.
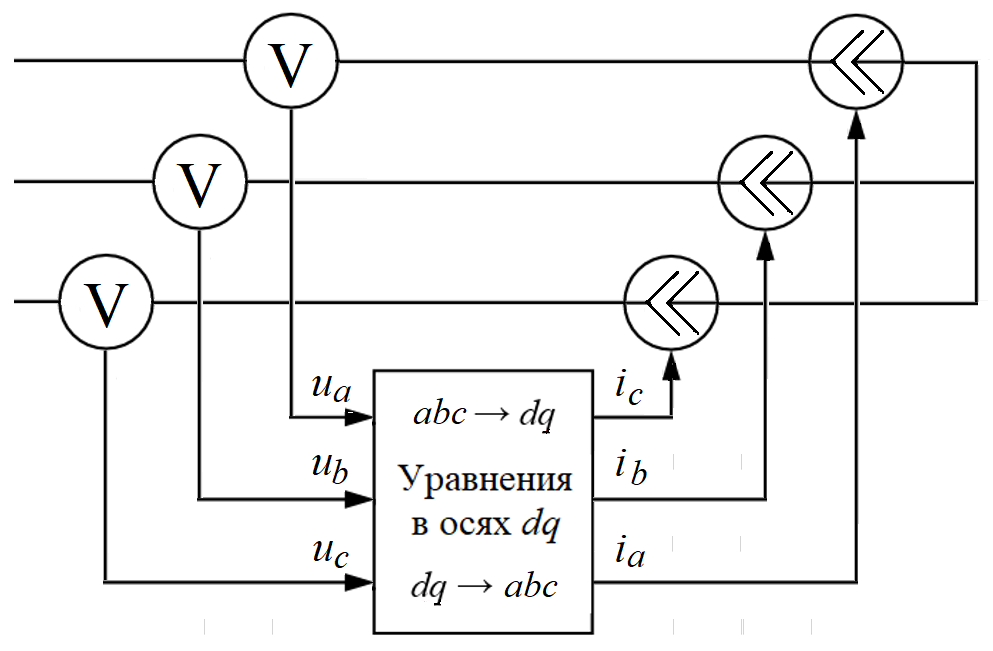
Преобразование от abc координат к dq осуществляется следующим образом:
Обратное преобразование:
- uA, uB, uC – фазные напряжения генератора
- iA, iB, iC – фазные токи генератора
- id, iq – проекции вектора тока статора на оси dq
- ud, uq – проекции вектора напряжения генератора на оси dq
- δГ – угол положения ротора
Переход от Вольт к относительным единицам осуществляется делением на номинальное амплитудное фазное напряжение генератора, переход от относительных единиц к Амперам умножением на номинальный амплитудный ток генератора.
Базисное напряжение равно номинальному напряжению генератора
Базисная мощность равна номинальной полной мощности генератора:
Базисный ток равен номинальному амплитудному и определяется как:
Статорные уравнения генератора имеют вид (здесь и далее используется запись уравнений в относительных единицах):
- Ψd, Ψq, Ψad, Ψaq – проекции векторов потокосцепления в зазоре и потокосцепления реакции статора на оси dq
- Rs – активное сопротивление обмотки статора генератора
- Xσs – индуктивное сопротивление рассеяния обмотки статора генератора
- ω – частота вращения ротора генератора
Уравнения ротора и демпферных контуров имеют вид:
- uf – напряжение обмотки возбуждения
- Ψf, Ψ1d, Ψ1q – потокосцепления обмотки возбуждения и демпферных контуров
- Rf, R1d, R1q – активные сопротивления обмотки возбуждения и демпферных контуров
- Xσf, Xσ1d,Xσ1q – индуктивные сопротивления рассеяния обмотки возбуждения и демпферных контуров
Выражения для определения потоков взаимоиндукции имеют вид:
где:
Xad, Xaq – сопротивления взаимоиндукции по осям dq.
Выражения для определения токов статора и тока возбуждения имеют вид:
где if – ток возбуждения генератора.
В модели генератора учитывается по одному демпферному контуру по каждой оси.
Характеристика холостого хода учитывается, если свойству Учитывать характеристику XX присвоено значение Да.
Характеристика холостого хода учитывается добавочной ЭДС ΔEI определяемой выражениями:
- Vunsat – напряжение статора генератора без учета насыщения (в относительных единицах численно равно току возбуждения генератора IFD)
- Vsаt – напряжение генератора в соответствии с характеристикой холостого хода
Уравнение движения генератора имеет вид:
- Tj – постоянная инерции турбоагрегата
- Mt – момент турбины
- Me – электромагнитный момент
- ω0 – синхронная угловая скорость
Модель синхронного генератора имеет порт «T» предназначенный для подключения блока первичного двигателя (турбины, дизеля и пр.). Порт служит для приема с первичного двигателя сигналов: угловой скорости ωt или момента Mt и для обратной передачи угловой скорости ротора генератора ω.
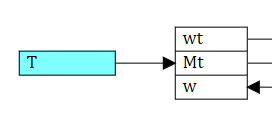
Сигнал ωt используется при необходимости задать скорость вращения генератора (равной значению этого сигнала). В этом случае свойству блока Брать с первичного двигателя нужно присвоить значение Скорость вращения, о.е.. По умолчанию данное свойство имеет значение Момент на валу, о.е.. Угол при этом определяется выражением:
Внешнее задания угловой скорости двигателя позволяет производить вычисление скорости во внешней модели. При этом электромагнитный момент двигателя берется с порта «P_out».
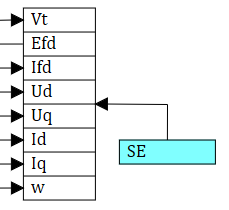
- напряжение генератора Vt
- ток возбуждения IFD
- напряжения генератора в dq координатах Vd и Vq
- ток генератора в dq координатах Id и Iq
- угловая скорость ротора генератора ω в о.е.
- первый элемент – ω – угловая скорость
- второй элемент – Te – электромагнитный момент
- Именованные: р/с для скорости и Н·м для момента
- Относительные: относительно номинальной скорости, относительно номинального момента
Свойства
| Название | Имя | Описание (опционально) |
|---|---|---|
| Тип | Type | Текстовое описание, удобное для работы с каталогом оборудования. Рекомендуется указывать стандартный тип генератора и при необходимости дополнительную информацию, например, номинальное напряжение. |
| Номинальная активная мощность, кВт | Pnom | |
| Номинальное напряжение, В | Unom | Действующее линейное |
| Номинальный коэффициент мощности, о.е. | cosf | |
| Номинальная частота, Гц | fnom | |
| Номинальная частота вращения, об/мин | Nnom | |
| Механическая постоянная времени, с | Tj | |
| Номинальный момент, Н∙м | Mnom | Расчетное (справочное) значение |
| Задать свои параметры схемы замещения | UserSet | Значения: Да/Нет. Если задано «Да», то можно внести свои параметры схемы замещения |
| Сопротивления обмотки статора [Xs, Rs], о.е. | Zs_oe | Задается в виде массива из двух элементов:
|
| Индуктивные сопротивления по продольной оси [Xd, X'd, X''d], о.е. | XXd_oe | Задается в виде массива из трех элементов:
|
| Индуктивные сопротивления по поперечной оси [Xq, X''q], о.е. | XXq_oe | Задается в виде массива из двух элементов
|
| Сопротивление обмотки возбуждения, Ом | r_f | |
| Постоянные времени при разомкнутой обмотке статора, [T'd0, T''d0, T''q0], с | Tdq0 | Задается в виде массива из трех элементов |
| Учитывать характеристику намагничивания | Hnamag | Значения: Да/Нет |
| Ток холостого хода базисный, А | Ifx | |
| Массив токов возбуждения, о.е. | Inamag | Задается в виде массива |
| Массив напряжений на выводах генератора, о.е. | Unamag | Задается в виде массива размерностью соответствующей массиву токов возбуждения |
| Начальное положение ротора и угловая скорость [γ0, ω0], [эл.гр., о.е.] | Init_M | Задается в виде массива из двух элементов:
|
| Брать с первичного двигателя | M_w | Значения:
|
| Единицы измерения параметров, выводимых с порта | Par_port | Значения:
|
Параметры
| Название | Имя | Описание (опционально) |
|---|---|---|
| Напряжение статора, В | Ut_par | Действующее значение |
| Ток статора, А | It_par | Действующее значение |
| Мощность активная, кВт | P_par | Действующее значение |
| Мощность реактивная, квар | Q_par | Действующее значение |
| Мощность полная, кВА | S_par | Действующее значение |
| Коэффициент мощности | cosF_par | |
| Напряжение возбуждения, В | Uf_par | |
| Ток возбуждения, А | If_par | |
| Частота вращения ротора, об/мин | N_par |
Порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| Входные порты | ||
| T | Многоканальная связь с моделью первичного двигателя, например паровой турбиной |
Математическая (именованная) |
| SE | Многоканальная связь с моделью системы возбуждения |
Математическая (именованная) |
| Выходные порты | ||
| P_out | Массив размерностью 2:
Размерность определяется свойством «Единицы измерения параметров, выводимых с порта» |
Математическая |
| Ненаправленные порты | ||
| 1 | Порт для подключения блока к трехфазной однолинейной электрической цепи |
Электрическая (однолинейная трехфазная именованная: a, b, c) |
Примеры
- Demo\Электрика\ЭЦ-Динамика v 2\Генератор синхронный\Генератор синхронный.prt