ЭЦД2 - Двигатель постоянного тока
 |
 |
|
| в палитре | на схеме |
Назначение
Блок предназначен для моделирования двигателя постоянного тока с одной обмоткой возбуждения.
Описание
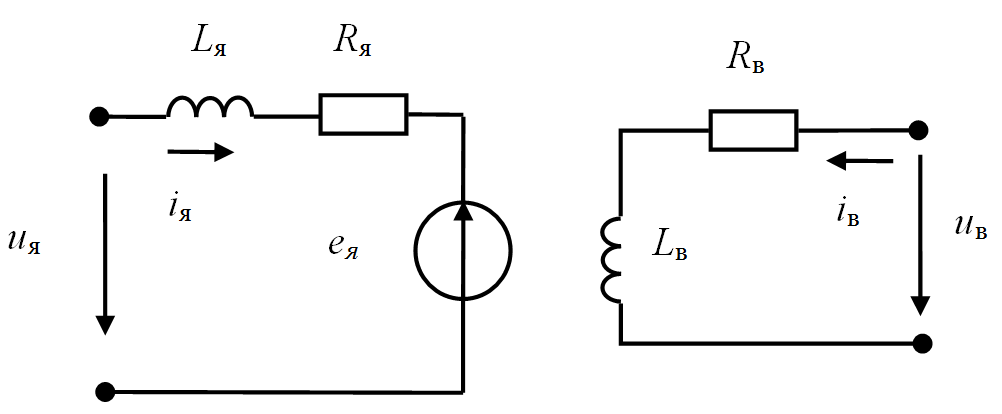
Модель двигателя постоянного тока основана на схеме замещения, приведённой на рисунке 1. Насыщение магнитопровода в модели не учитывается.
где:
- ua, ue – напряжение на якорной обмотке двигателя и обмотке возбуждения
- ea – ЭДС якоря
- ia, ie – ток якоря и ток обмотки возбуждения
- Ra, Re – активное сопротивление якорной цепи и обмотки возбуждения
- La, Le – индуктивность якорной цепи и обмотки возбуждения
Уравнения, которыми описываются процессы в модели двигателя постоянного тока, имеют следующий вид:
где:
- J – суммарный момент инерции якоря и нагрузки
- ω – скорость вращения вала двигателя
- Tel – электромагнитный момент двигателя
- Td – момент сопротивления движению
- kae – коэффициент связи обмоток
- П – механические потери, определяемые по формуле:
Свойства
| Название | Имя | Описание (опционально) |
|---|---|---|
| Тип | Type | Текстовое описание, удобное для работы с каталогом оборудования. Рекомендуется указывать стандартный тип двигателя и при необходимости дополнительную информацию, например, номинальное напряжение. |
| Номинальная частота вращения, об/мин | Nnom | |
| Параметры обмотки якоря [Lя, Rя], [Гн, Ом] | Za | Задается в виде массива из двух элементов:
|
| Параметры обмотки возбуждения [Lв, Rв], [Гн, Ом] | Zf | Задается в виде массива из двух элементов:
|
| Коэффициент связи обмоток | Kaf | |
| Момент инерции, кг·м² | J | |
| Механические потери [T0, F], [Н·м, Н·м·с] | Tlos | Задается в виде массива из двух элементов:
|
| Начальная угловая скорость [ω0], [рад/с] | Init_M |
Параметры
| Название | Имя | Описание (опционально) |
|---|---|---|
| Ток якоря, А | Ia_par | |
| Ток возбуждения, А | If_par | |
| Частота вращения, об/мин | N_par | |
| Электромагнитный момент, Н·м | Te_par |
Порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| Входные порты | ||
| Tm | Механический момент, Н·м |
Математическая |
| Выходные порты | ||
| ω | Угловая скорость, 1/с |
Математическая |
| Ненаправленные порты | ||
| a- | Порт для подключения блока к электрической цепи. Плюс обмотки якоря |
Электрическая |
| a+ | Порт для подключения блока к электрической цепи. Минус обмотки якоря |
Электрическая |
| f+ | Порт для подключения блока к электрической цепи. Плюс обмотки возбуждения |
Электрическая |
| f- | Порт для подключения блока к электрической цепи. Минус обмотки возбуждения |
Электрическая |
Примеры
- Demo\Электрика\ЭЦ-Динамика v 2\Двигатели постоянного тока\Двигатель постоянного тока.prt