ЭЦД2 - Двигатель синхронный (sp-rotor, 1 л. сх.)
 |
 |
|
| в палитре | на схеме |
Назначение
Блок предназначен для моделирования синхронного двигателя.
Описание
В основе модели синхронного двигателя (СД) лежат уравнения Парка-Горева, позволяющие рассчитывать электромеханические и электромагнитные переходные процессы. Расчет выполняется на основе уравнений для мгновенных значений токов и напряжений.
Общая структура модели СД представлена на рисунке 1.
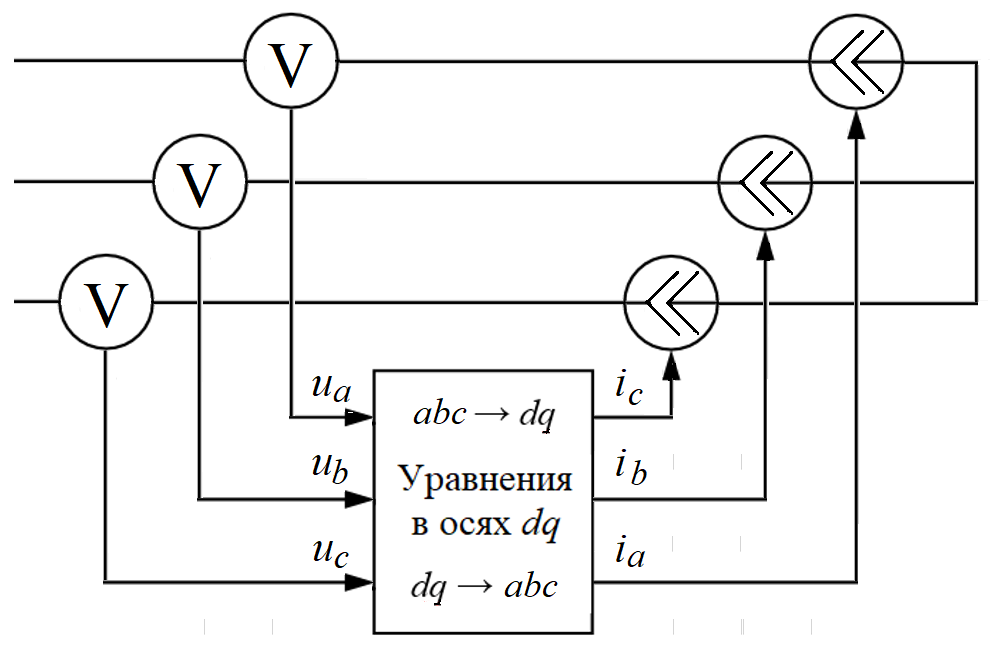
Преобразование от abc координат к dq осуществляется следующим образом:
Обратное преобразование:
- uA, uB, uC – фазные напряжения статора
- iA, iB, iC – фазные токи статора
- id, iq – проекции вектора тока статора на оси dq
- ud, uq – проекции вектора напряжения на оси dq
- δГ – угол положения ротора
Переход от Вольт к относительным единицам осуществляется делением на номинальное амплитудное фазное напряжение СД, переход от относительных единиц к Амперам умножением на номинальный амплитудный ток СД.
Базисное напряжение равно номинальному напряжению СД:
Поскольку номинальная мощность СД в каталогах является мощностью на валу, то базисная мощность равная номинальной полной мощности определяется с учетом КПД (η):
Базисный ток равен номинальному амплитудному:
В модели учитывается по одному демпферному контуру по каждой оси. Изменение параметров контура не учитывается, поэтому рекомендуется использовать для моделирования явнополюсных СД (наиболее распространены СД с шихтованным ротором).
Характеристики неявнополюсных СД с массивным ротором могут воспроизводиться некорректно.
Статорные уравнения СД имеют вид (здесь и далее используется запись уравнений в относительных единицах):
- Ψd, Ψq, Ψad, Ψaq – проекции векторов потокосцепления в зазоре и потокосцепления реакции статора на оси dq
- Rs – активное сопротивление обмотки статора
- Xσs – индуктивное сопротивление рассеяния обмотки статора
- ω – частота вращения ротора
Уравнения ротора и демпферных контуров имеют вид:
- uf – напряжение обмотки возбуждения
- Ψf, Ψ1d, Ψ1q – потокосцепления обмотки возбуждения и демпферных контуров
- Rf, R1d, R1q – активные сопротивления обмотки возбуждения и демпферных контуров
- Xσf, Xσ1d,Xσ1q – индуктивные сопротивления рассеяния обмотки возбуждения и демпферных контуров
Выражения для определения потоков взаимоиндукции имеют вид:
где:
Xad, Xaq – сопротивления взаимоиндукции по осям dq.
Выражения для определения токов статора и тока возбуждения имеют вид:
где if – ток возбуждения.
Уравнение движения имеет вид:
- TJ – постоянная инерции агрегата, равная сумме постоянных инерции двигателя TJ СД и механизма TJ mech
- Tmech – момент сопротивления механизма
- Te – электромагнитный момент
- ω0 – синхронная угловая скорость
Момент сопротивления на входном порте Tm задается в относительных единицах, приведенным к номинальному моменту СД.
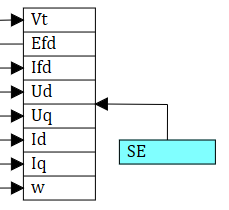
Порт «SE» модели СД предназначен для подключения блока системы возбуждения. Входным сигналом от системы возбуждения является сигнал напряжения возбуждения EFD.
- напряжение статора Vt
- ток возбуждения IFD
- напряжения в dq координатах Vd и Vq
- ток статора в dq координатах Id и Iq
- угловая скорость ротора ω в о.е.
- первый элемент – ω – угловая скорость
- второй – Te – электромагнитный момент
- Именованные: р/с для скорости и Н·м для момента
- Относительные: относительно номинальной скорости, относительно номинального момента
По умолчанию в блоке включен расчет параметров схемы замещения по каталожным данным СД. Отключить автоматический расчет и задать свои параметры схемы замещения можно установив свойство Задать свои параметры схемы замещения равным Да.
Следует обратить внимание на то, что в данной модели СД постоянные времени влияют на скорость электромагнитных процессов, а сопротивление обмотки возбуждения, заданное в Ом (свойство r_f), используется только для расчета напряжения возбуждения Uf = r_f ·If и однозначное соотношение постоянных времени и сопротивлений не учитывается.
С учетом этой особенности правильным является задание необходимых постоянных времени для анализа процессов в электрической сети, при этом получившееся значение тока возбуждения должно соответствовать близким к реальным значениям, а напряжение возбуждения может сильно отличаться от реальных значений.
Во встроенной методике расчета параметров СД по каталожным данным для расчета постоянных времени используется коэффициент 0.7, то есть сопротивление в Ом принимается равным 0.7 Uf nom/ If nom. В основном это объясняется тем, что в каталогах номинальные напряжение и ток возбуждения заданы при некоторой рабочей температуре, а рекомендованная в литературе расчетная температура ниже (75° С). Кроме того есть потери напряжения и реальное напряжение на обмотке возбуждения несколько меньше, чем указываемое в каталоге.
Таким образом, если использовать расчетные параметры, то соответствие постоянных времени и напряжения возбуждения будет наблюдаться, если свойство r_f задать равным 0.7 Uf nom/ If nom, но при номинальном токе возбуждения напряжение возбуждения также будет 0.7 от номинального.
Свойства
| Название | Имя | Описание (опционально) |
|---|---|---|
| Тип | Type | Текстовое описание, удобное для работы с каталогом оборудования. Рекомендуется указывать стандартный тип двигателя и при необходимости дополнительную информацию, например, номинальное напряжение. |
| Номинальная мощность на валу, кВт | Pnom | |
| Номинальное напряжение, В | Unom | Действующее линейное |
| Номинальный коэффициент мощности, о.е. | cosf | |
| Номинальный КПД, % | Eff | |
| Номинальная частота питающей сети, Гц | fnom | |
| Номинальное напряжение возбуждения, В | Ufnom | |
| Номинальный ток возбуждения, А | Ifnom | |
| Сопротивление обмотки возбуждения, Ом | r_f | |
| Номинальная частота вращения, об/мин | Nnom | |
| Момент инерции двигателя, кг·м² | Jms | |
| Момент инерции механизма, кг·м² | Jmex | |
| Суммарная механическая постоянная времени, с | Tj | Расчетное (справочное) значение |
| Номинальный момент, Н∙м | Mnom | Расчетное (справочное) значение |
| Задать свои параметры схемы замещения | UserSet | Значения: Да/Нет. Если задано «Да», то можно внести свои параметры схемы замещения |
| Сопротивления обмотки статора [Xs, Rs], о.е. | Zs_oe | Задается в виде массива из двух элементов:
|
| Индуктивные сопротивления по продольной оси [Xd, X'd, X''d], о.е. | XXd_oe | Задается в виде массива из трех элементов
|
| Индуктивные сопротивления по поперечной оси [Xq, X''q], о.е. | XXq_oe | Задается в виде массива из двух элементов:
|
| Постоянные времени при разомкнутой обмотке статора, [T'd0, T''d0, T''q0], с | Tdq0 | Задается в виде массива из трех элементов. |
| Кратность пускового тока, о.е. | Ip_oe | |
| Кратность максимального синхронного момента, о.е. | Msmax_oe | |
| Кратность пускового момента (s = 1), о.е. | Mp_oe | |
| Кратность входного момента (s = 0,05), о.е. | Ms05_oe | |
| Отношение Xq/Xd | Xq_Xd | |
| Рекомендуемая кратность гасительного сопротивления | Krf | Расчетное (справочное) значение. Требуется для системы возбуждения. |
| Начальное положение ротора и угловая скорость [γ0, ω0], [эл.гр., о.е.] | Init_M | Задается в виде массива из двух элементов:
|
| Блокировать отрицательную угловую скорость ротора | Wlock | Значения: Да/Нет. Если задано «Да», при решении уравнения движения блокируется отрицательная скорость |
| Коэффициент вязкого трения [F∙ωном], о.е. | F_c | |
| Единицы измерения параметров, выводимых с порта | Par_port | Значения:
|
Параметры
| Название | Имя | Описание (опционально) |
|---|---|---|
| Напряжение статора, В | Ut_par | Действующее значение |
| Ток статора, А | It_par | Действующее значение |
| Мощность активная потребляемая, кВт | P_par | Действующее значение |
| Мощность реактивная потребляемая, квар | Q_par | Действующее значение |
| Мощность полная потребляемая, кВ·А | S_par | Действующее значение |
| Коэффициент мощности | cosF_par | |
| Напряжение возбуждения, В | Uf_par | |
| Ток возбуждения, А | If_par | |
| Частота вращения, об/мин | N_par |
Порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| Входные порты | ||
| Tm | Механический момент, о.е. |
Математическая |
| SE | Многоканальная связь с моделью системы возбуждения |
Математическая (именованная) |
| Выходные порты | ||
| P_out | Массив размерностью 2:
Размерность определяется свойством «Единицы измерения параметров, выводимых с порта» |
Математическая |
| Ненаправленные порты | ||
| 1 | Порт для подключения блока к трехфазной однолинейной электрической цепи |
Электрическая (однолинейная трехфазная именованная: a, b, c) |
Примеры
- Demo\Электрика\ЭЦ-Динамика v 2\Двигатели синхронные\Двигатель синхронный (sp-rotor, 1 л. сх.).prt