Пружина вращательного движения с переменным коэффициентом
 |
 |
|
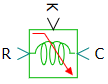
| в палитре | на схеме |
В блоке реализована математическая модель пружины с переменным коэффициентом жесткости,
описываемая следующими уравнениями:

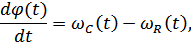

где T(t) - момент пружины, Н·м; K(t) – коэффициент жесткости, Н·м/рад; Kmin – минимально возможный коэффициент жесткости, Н·м/рад; φ(t) – угол между портами C и R, рад; ωC(t) – угловая скорость порта C, рад/с; ωR(t) - угловая скорость порта R, рад/с.
где T(t) - момент пружины, Н·м; K(t) – коэффициент жесткости, Н·м/рад; Kmin – минимально возможный коэффициент жесткости, Н·м/рад; φ(t) – угол между портами C и R, рад; ωC(t) – угловая скорость порта C, рад/с; ωR(t) - угловая скорость порта R, рад/с.
Порты
Блок имеет два механических порта вращательного движения – C и R, по которым поступают угловые скорости концов пружины, и один математический порт, через который в модель поступает текущее значение коэффициента жесткости.
Свойства
- Kmin - минимально возможный коэффициент жесткости, Н·м/рад;
- Fi0 - начальное значение угла (начальная деформация пружины), рад.
Параметры
- T - момент, Н·м;
- Fi - деформация пружины, рад.
- W - разность угловых скоростей, рад/с;