О расчетном коде "Механика 3D"
Расчетный код предназначен для моделирования динамики пространственного движения многозвенного механизма, состоящего из абсолютно твердых тел, соединенных кинематическими парами (неголономными связями). Топология механической системы может быть произвольной и содержать замкнутые кинематические цепи.
Топология многозвенного механизма
- Блок Заделка создает неподвижную систему координат.
- Линия связи представляет собой систему координат. Блоки, подключенные к одной ветвящейся линии связи подключены к одной системе координат.
- Преобразования координат позволяют задавать кинематические взаимосвязи между системами
координат:
- блок Преобразование координат создает жесткую связь между двумя системами координат.
- блоки Кинематические пары создают подвижную связь между двумя системами координат.
- Дочерние блоки подключаются к системам координат и позволяют задавать свойства
механизма и считывать параметры его движения:
- Блок Масс-инерционные характеристики задает массу и инерцию твердого тела.
- Блок из подгруппы Элементы нагружения позволяют задавать действия внешних и внутренних сил и моментов.
- Блоки Датчик движения и Датчик ускорения считывают параметры движения системы координат.
- Блок 3D модель позволяет отобразить движение тел в пространстве при помощи Модуля 3D-визуализации.


Блок Масс-инерционные характеристики подключен к заделке при помощи блока Шестиподвижная КП, поскольку блок Линейная пружина не создает связь между системой координат центра масс и заделкой.
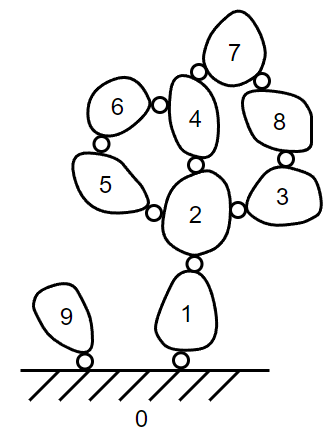
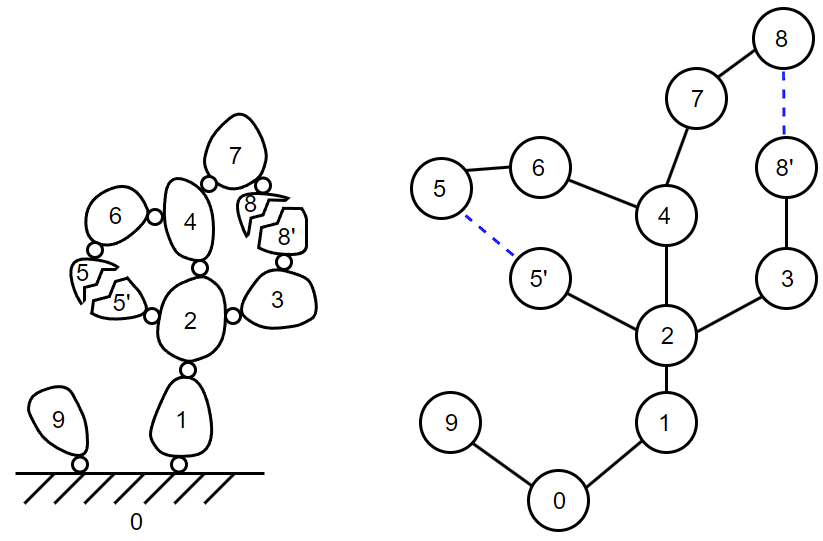
Замкнутые кинематические цепи
В общем случае механизм содержит замкнутые кинематические цепи и является связным графом с циклами. При анализе топологии модели каждый цикл разрывается, граф приводится к виду дерева и на месте разрыва формируются две системы координат, положения, скорости и ускорения которых должны совпадать (Рисунок 4).
При разрыве циклов в систему добавляются алгебраические уравнения связей, которые обеспечивают замкнутость разорванных кинематических цепей и выглядят следующим образом:
где:
a1, a2 - ускорение первой и второй систем координат в месте разрыва,
Kv - приведенный коэффициент вязкости замкнутых кинематических цепей,
v1, v2 - скорость первой и второй систем координат в месте разрыва,
Kp - приведенный коэффициент упругости замкнутых кинематических цепей,
p1, p2 - положение первой и второй систем координат в месте разрыва.
Приведенные коэффициенты упругости и вязкости задаются в свойствах блока Настройки модели.