Поступательный люфт с упорами
Модель движения тел с люфтом и упорами
Расположение
SimInTech\Demo\Механика\Элементы поступательного движения\Поступательный люфт с упорами\Поступательный люфт с упорами.prt
Описание
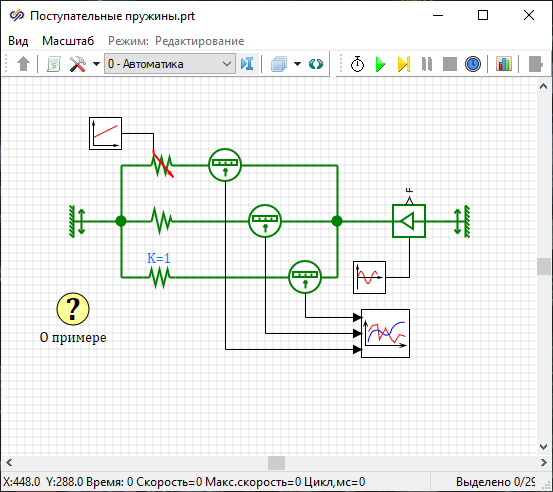
Данный проект демонстрирует возможности библиотеки "Механика" по моделированию движения тел с люфтом и упорами.
Блоки "Масса" моделируют движение ведущего и ведомого тел. Ведущее тело имеет массу 0.01 кг, ведомое - 2 кг.
Блок "Источник силы" моделирует действие на ведущий вал внешнего крутящего момента, значение которого изменятся по гармоническому закону и формируется блоком "Синусоида".
Блок "Поступательный люфт" моделирует люфт между ведущим и ведомыми телами.
Блок "Поступательное смещение" определяет положение элемента, смещенного на 0.5 м относительно ведомого тела.
Блок "Поступательный ограничитель положения" моделирует соприкосновение смещенного элемента с неподвижными упорами.

Под действием силы ведущее тело начинает движение. Из-за наличия люфта ведомое тело остается в состоянии покоя до тех пор, пока величина люфта не снизится до нуля. Из-за удара ведущее тело практически останавливается и затем тела продолжают движение с одной скоростью.
График положения смещенного элемента полностью повторяет график положения ведомого тела. Смещенный элемент соприкасается с упорами, имеющими положения 0.4 и 0.6 м, из-за чего тела останавливаются.