Асинхронный двигатель с короткозамкнутым ротором (с учетом насыщения)
 |
 |
|
| в палитре | на схеме |
Описание
Модель используется совместно с элементами библиотек ЭЦ - Динамика (ЭЦД) 2.0 и Механика.
В модели статора с помощью интегрирования вычисляется поток статора в системе αβ (ось α ориентирована по оси фазы А):
- usα и usβ — проекции вектора напряжения статора на оси α и β,
- RS — сопротивление статора,
- iSα — проекция вектора тока статора на ось α.
В модели ротора вычисляется величина потокосцепления ротора в системе dq (ось d ориентирована по потоку ротора):
- TR = LR/RR — постоянная времени ротора,
- LR — индуктивность ротора,
- RR — сопротивление ротора,
- Lm — индуктивность намагничивания,
- iSd — проекция вектора тока статора на ось d,
- ΨRd — проекция вектора потокосцепления ротора на ось d.
Затем осуществляется переход:
- αβ — двухфазная неподвижная прямоугольная система координат, ось α которой сонаправлена с осью A трёхфазной системы координат,
- ΨRd, ΨRd — проекции вектора потокосцепления ротора на оси dq,
- ΨRα, ΨRβ — проекции вектора потокосцепления ротора на оси αβ.
По известным потоку и току статора в системе вычисляется потокосцепление намагничивания ψm:
- ΨS — вектор потокосцепления статора,
- ΨσS — вектор потокосцепление рассеяния статора,
- LσS — индуктивность рассеяния статора,
- IS — обобщённый вектор тока статора.
По характеристике, заданной в файле Lm = f(Fm) находится ток намагничивания:
- Ψm — вектор потокосцепления намагничивания асинхронного двигателя,
- Lm — значение индуктивности намагничивания.
По потоку намагничивания и потоку ротора вычисляется ток ротора:
- Ψm — вектор потокосцепления намагничивания асинхронного двигателя,
- ΨσR — вектор потокосцепление рассеяния ротора,
- ΨR — вектор потокосцепления ротора,
- LσR — индуктивность рассеяния ротора,
- IR — обобщённый вектор тока ротора.
Определяется вектор тока статора:
- Im — вектор тока намагничивания,
- IR — обобщённый вектор тока ротора.
Блок задержки на такт интегрирования Δt обеспечивает развязку логической петли. При этом вычисленное в текущем цикле расчёта значение Isбудет использоваться на следующем цикле.
Электрический угол необходимый для координатных преобразований модели вычисляется с помощью выражения:
- Zp — число пар полюсов двигателя,
- ωR — угловая скорость ротора,
- Δω — угловая скорость скольжения поля,
- Lm — индуктивность намагничивания,
- ΨR — вектор потокосцепления ротора,
- TR = LR/RR — постоянная времени ротора,
- LR — индуктивность ротора,
- RR — сопротивление ротора,
- iSq — проекция вектора тока статора на ось q.
Электромагнитный момент двигателя вычисляется с помощью формулы:
- Zp — число пар полюсов двигателя,
- KR = Lm/LR — коэффициент отношения индуктивности намагничивания к индуктивности ротора,
- Lm — индуктивность намагничивания,
- LR — индуктивность ротора,
- ΨR — вектор потокосцепления ротора,
- iSq — проекция вектора тока статора на ось q.
Координатные преобразования осуществляются соответствующими преобразователями координат (ABC ⇔ αβ ⇔ dq).
Выходной сигнал электромагнитного момента двигателя "Mem" следует подавать на модель механической части электропривода, построенной из элементов раздела Механика. В общем случае движение ротора двигателя описывается уравнением:
- Mem — электромагнитный момент двигателя,
- Mload — момент создаваемый нагрузкой,
- J — суммарный момент инерции приложенный к ротору (сумма момента инерции нагрузки и момента инерции ротора).
Модель механической части электропривода преобразует сигнал электромагнитного момента в значение угловой скорости ротора "Wr", подаваемое на соответствующий вход модели двигателя.
Задание характеристики намагничивания в файле
Файл с характеристикой намагничивания должен располагаться в директории проекта и быть сохранен с расширением "*.dat". Внутренняя структура файла должна иметь следующий вид:
Fm = [[0, Ψm1, Ψm2, Ψm3, Ψm4, Ψm5, Ψm6, Ψm7, Ψm8, Ψm9],
[Lm1, Lm1, Lm2, Lm3, Lm4, Lm5, Lm6, Lm7, Lm8, Lm9]];- Ψmi — потокосцепление намагничивания, Вб,
- Lmi — соответствующее значение индуктивности намагничивания, Гн.
Файл может быть сформирован по известной характеристике намагничивания с использованием формулы:
- Ψmi — потокосцепление намагничивания, Вб,
- imi — значение тока, А.
Рекомендуемое количество точек аппроксимации функции Lm = f(Fm) находится в диапазоне от 5 до 20.
Fm = [[0, 0.43790, 0.56328, 0.68847, 0.81315, 0.93774, 1.06086, 1.18122, 1.29673, 1.29673],
[0.01684, 0.01684, 0.01735, 0.01750, 0.01693, 0.01645, 0.014971333, 0.01311, 0.00975, 0.00750]];Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
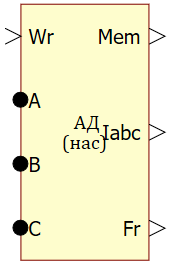
| Wr | Скорость ротора | Математическая |
Выходные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| Mem | Электромагнитный момента двигателя | Математическая |
| Iabc | Токи фаз А, В и С | Математическая |
| Fr | Модуль потока ротора | Математическая |
Ненаправленные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| A | Входное напряжение фазы A | Электрическая |
| B | Входное напряжение фазы B | Электрическая |
| C | Входное напряжение фазы C | Электрическая |
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Имя файла с характеристикой намагничивания | read_from_ext_file | Имя файла зависимости. Если в ячейке "Значение" свойства "Имя файла с характеристикой намагничивания" записано имя файла, то зависимость главной индуктивности от потокосцепления намагничивания задается заданным файлом. Подробно о принципах формирования файла с характеристикой описано в секции "Способ задания характеристики" |
Вещественное | |
| Характеристика намагничивания | Fm | Зависимость статической индуктивности
намагничивания от потокосцепления намагничивания, Гн. Заполняется автоматически при загрузке файла, указанного в свойстве "Имя файла с характеристикой намагничивания":
|
Вещественное | |
| Сопротивление статора, Ом | Rs | Сопротивление статора | 0.086 | Вещественное |
| Сопротивление ротора, Ом | Rr | Сопротивление ротора | 0.0025 | Вещественное |
| Индуктивность рассеяния ротора, Гн | dLr | Индуктивность рассеяния ротора | 0.0016 | Вещественное |
| Индуктивность рассеяния статора, Гн | dLs | Индуктивность рассеяния статора | 1 | Вещественное |
| Число пар полюсов двигателя | Zp | Число пар полюсов двигателя | 1 | Вещественное |
Параметры
Блок не имеет параметров.