Скорость АД
Модель управления скоростью асинхронного двигателя с короткозамкнутым ротором (без учета насыщения)
Расположение
SimInTech\Demo\Электроприводы\Асинхронный привод\Скорость АД\АД.pak
Описание
В демо-примере демонстрируется управление скоростью асинхронного двигателя с короткозамкнутым ротором (без учета насыщения) с помощью модели управления.
Внимание:
- Данный пример состоит из двух проектов, входящих в состав пакета проектов "АД.pak". Для запуска процесса моделирования необходимо запустить на расчет пакет проектов.
- Для удобства задания значений свойств блоков модели значения характеристик двигателя задаются с помощью скрипта страницы.
Система регулирования скорости в электроприводе строится как двухконтурная система подчиненного регулирования, имеющая в качестве внутреннего контура систему управления моментом и внешний контур скорости.
Подробное описание модели представлено в [1, 2].
Модель управления скоростью асинхронного двигателя с короткозамкнутым ротором (без учета
насыщения) представлена на рисунке (Рисунок 1).
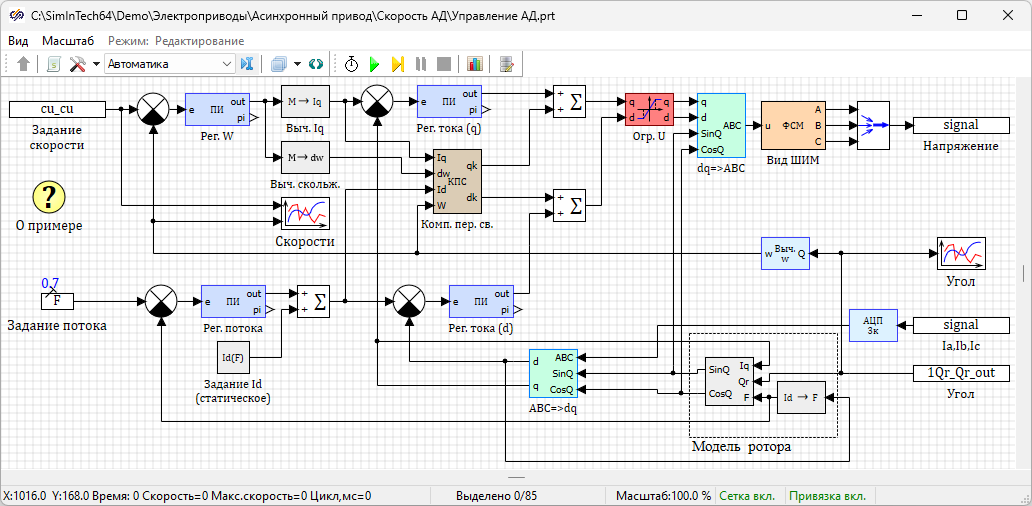
Рисунок 1. Модель управления скоростью асинхронного двигателя
Модель асинхронного двигателя с короткозамкнутым ротором (без учета насыщения) представлена
на рисунке (Рисунок
2).
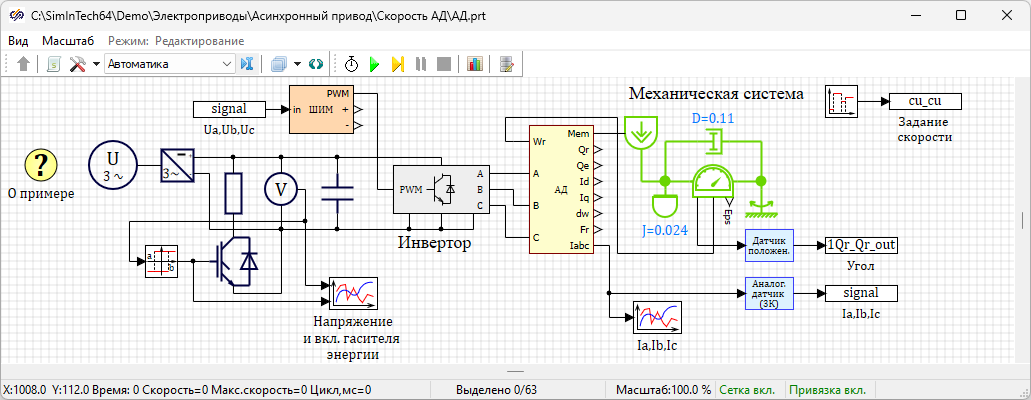
Рисунок 2. Модель асинхронного двигателя
На графике "Напряжение и вкл. гасителя энергии" показано изменение напряжения и
сигналы включения гасителя энергии (Рисунок 3).
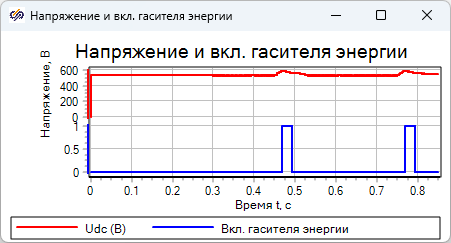
Рисунок 3. График изменения напряжения и сигнала включения гасителя энергии
На графике "Токи фаз A, B и C" показаны графики изменения токов фаз А, В и С (Рисунок 4).
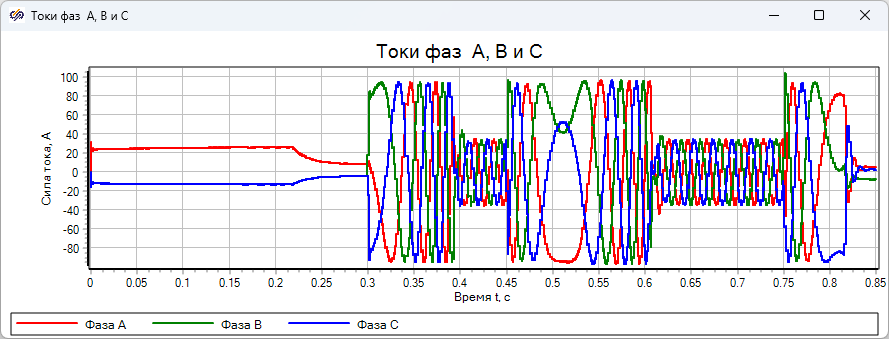
Рисунок 4. График изменения токов фаз А, В и С
На графике "Угол" показано изменение угла ротора асинхронного электродвигателя
(Рисунок 5).
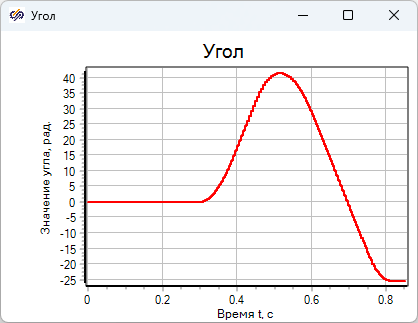
Рисунок 5. График изменения угла ротора асинхронного электродвигателя
На графике "Заданная и отрабатываемая скорость" показано изменение скорости
асинхронного двигателя (Рисунок 6).
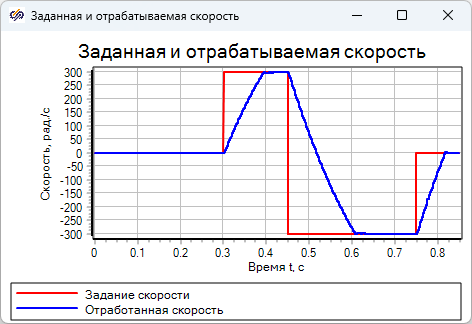
Рисунок 6. График изменения скорости асинхронного двигателя
Используемые блоки
- Асинхронный двигатель с короткозамкнутым ротором (без учета насыщения)
- АЦП (3 канала)
- Аналоговый датчик (3 канала)
- Блок компенсации перекрестных связей
- Вычисление потока
- Вычисление угла поля
- Вычислитель скорости
- Вычисление частоты скольжения
- Вычисление q - составляющей статорного тока
- Датчик положения абсолютный
- Задатчик установившегося значения тока статора по оси d
- Инвертор
- Ограничитель напряжения в осях dq
- Преобразователь координат из системы АВС в систему dq
- Преобразователь координат из системы dq в систему ABC
- ПИ – регулятор
- Регулятор с демпфирующей связью
- Формирователь способа модуляции
- ШИМ – преобразователь