Положение АД
Модель управления положением асинхронного двигателя с короткозамкнутым ротором (без учета насыщения)
Расположение
SimInTech\Demo\Электроприводы\Асинхронный привод\Положение АД\АД.pak
Описание
В демо-примере демонстрируется управление положением асинхронного двигателя с короткозамкнутым ротором (без учета насыщения) с помощью модели управления.
Внимание:
- Данный пример состоит из двух проектов, входящих в состав пакета проектов "АД.pak". Для запуска процесса моделирования необходимо запустить на расчет пакет проектов.
- Для удобства задания значений свойств блоков модели значения характеристик двигателя задаются с помощью скрипта страницы.
Подробное описание модели представлено в [1, 2].
Модель управления положением асинхронного двигателя с короткозамкнутым ротором (без
учета насыщения) представлена на рисунке (Рисунок
1).
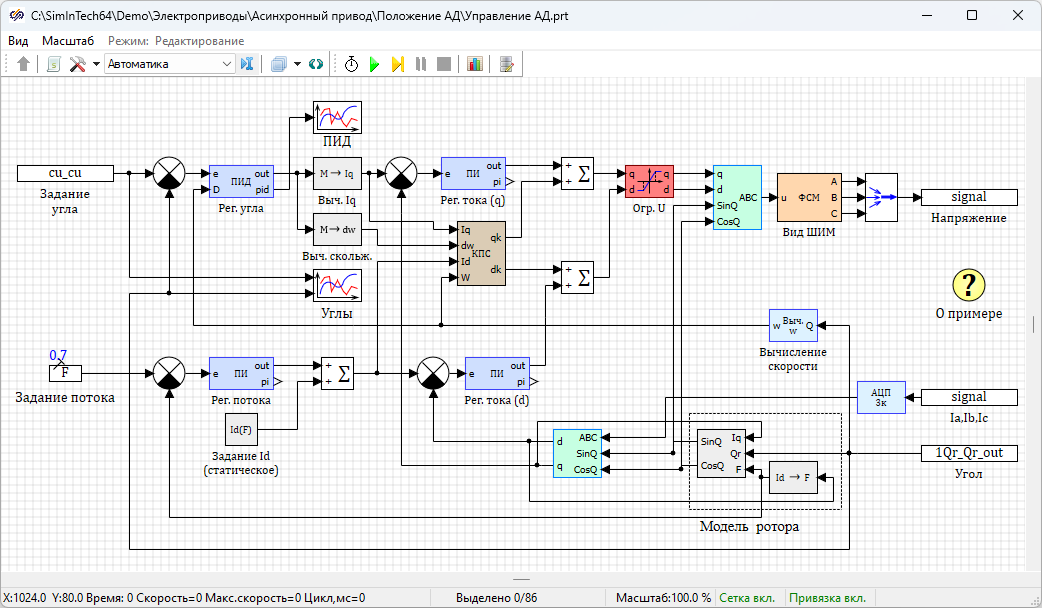
Рисунок 1. Модель управления положением асинхронного двигателя
Модель асинхронного двигателя с короткозамкнутым ротором (без учета насыщения)
представлена на рисунке (Рисунок 2).
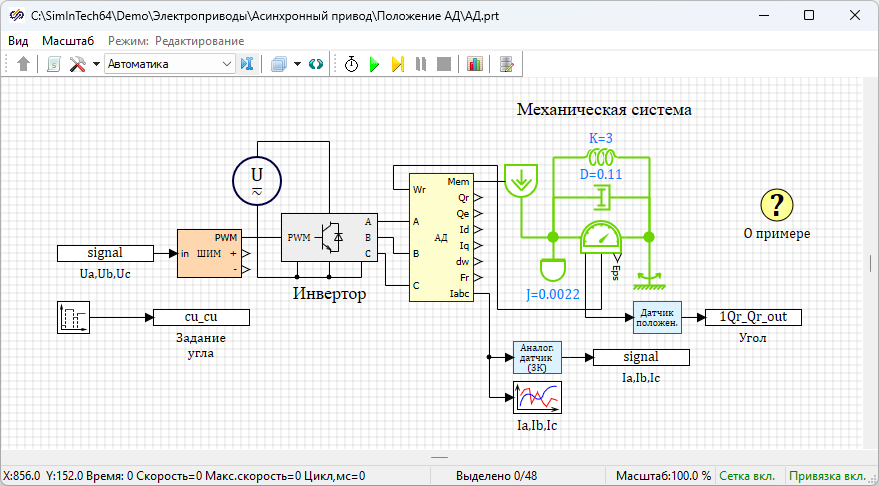
Рисунок 2. Модель асинхронного двигателя
На графике "Углы" показано изменение угла ротора асинхронного электродвигателя
(Рисунок
3).
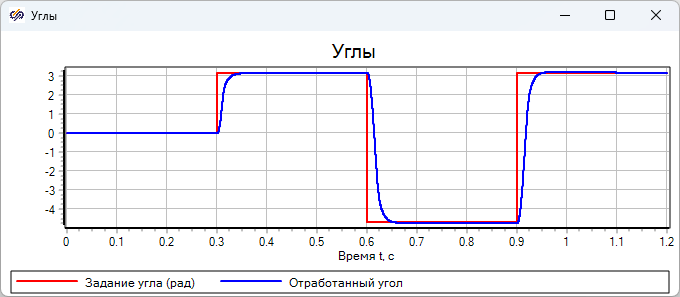
Рисунок 3. График изменения угла ротора асинхронного электродвигателя
На графике "П, И, Д - составляющие управляющего воздействия" показаны
изменения составляющих П, И и Д (Рисунок
4).
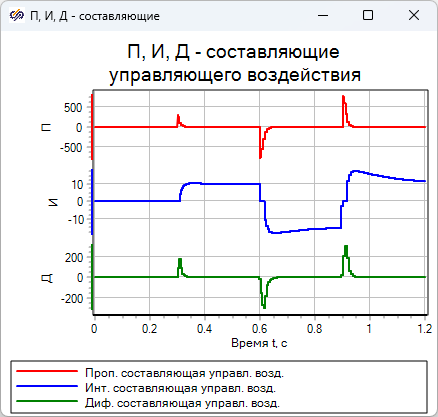
Рисунок 4. График изменения составляющих П, И и Д управляющего воздействия
На графике "Токи фаз A, B, C" показаны графики изменения токов фаз А, В и С
(Рисунок
5).

Рисунок 5. График изменения токов фаз А, В и С
Используемые блоки
- Асинхронный двигатель с короткозамкнутым ротором (без учета насыщения)
- АЦП (3 канала)
- Аналоговый датчик (3 канала)
- Блок компенсации перекрестных связей
- Вычисление потока
- Вычисление угла поля
- Вычислитель скорости
- Вычисление частоты скольжения
- Вычисление q - составляющей статорного тока
- Датчик положения абсолютный
- Задатчик установившегося значения тока статора по оси d
- Инвертор
- Ограничитель напряжения в осях dq
- Преобразователь координат из системы АВС в систему dq
- Преобразователь координат из системы dq в систему ABC
- ПИ – регулятор
- Регулятор с демпфирующей связью
- Формирователь способа модуляции
- ШИМ – преобразователь