Дискретные переменные состояния
 |
 |
| Векторный
| |
| в палитре | на схеме |
Описание
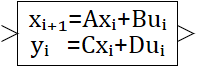
Блок реализует описание многомерной линейной динамической системы в матричной форме:
где – матрицы, а именно: собственная матрица, матрица входа, матрица выхода и матрица обхода, соответственно;
– вектор переменных состояния (размерностью );
– вектор входа (размерностью );
– вектор выхода, (размерностью ).
Размерность матрицы . Размерность матрицы . Размерность матрицы . Размерность матрицы .
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| inport | Входной сигнал . | Математическая |
Выходные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| outport | Выходной сигнал . | Математическая |
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Число переменных состояния | xc | Размерность . | 2 | Целое |
| Число входных воздействий | uc | Размерность . | 1 | Целое |
| Число выходов | yc | Размерность . | 1 | Целое |
| Матрица A(Nx·Nx) | A | Коэффициенты матрицы A. | [[-1 , 1];[-1 , 0]] | Матрица |
| Матрица B(Nu·Nx) | B | Коэффициенты матрицы B. | [[1 , 0]] | Матрица |
| Матрица C(Nx·Ny) | C | Коэффициенты матрицы C. | [[0];[1]] | Матрица |
| Матрица D(Nu·Ny) | D | Коэффициенты матрицы D. | [[0]] | Матрица |
| Начальные условия (Nx) | y0 | Вектор начальных условий, размерностью . | [0 , 0] | Массив |
| Период квантования | tau | Период квантования T расчёта блока. | [1] | Вещественное |
Параметры
Блок не имеет параметров.
Примечание:
- По умолчанию блок реализует обработку скалярного входного сигнала.
- Коэффициенты ai, bj вводятся по возрастающим степеням z.
- Для правильной работы данного блока необходимо задать максимальный шаг интегрирования не больше, чем 0,5·T. При интегрировании с постоянным шагом рекомендуется задать шаг таким, чтобы период квантования был кратен шагу интегрирования T = k·h, где k, h – целое число и шаг интегрирования.