Блок реализует модель асинхронного электродвигателя. Предназначен для использования в
трехфазных однолинейных электрических схемах в "контуре переменного тока".
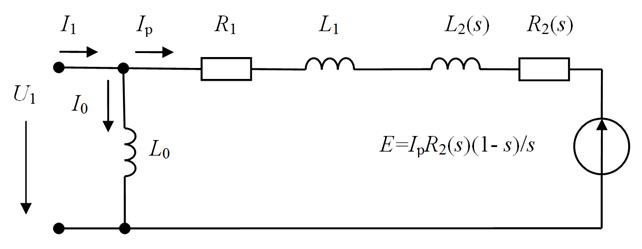
Расчетная схема
Модель асинхронного двигателя основана на Г-образной схеме замещения с вынесенной цепью
намагничивания, приведенной на рисунке 1. В данной схеме параметры ротора зависят от
скольжения, для учета эффекта вытеснения тока по длине паза (или в пусковой и рабочей
обмотках). Модель выполнена по прямой последовательности и обеспечивает расчет действующих
значений напряжений, токов и мощностей.
Рисунок 1. Схема замещения асинхронного двигателяПо каталожным данным предварительно определяют следующие параметры:
R1, X1 (L1) – активное и реактивное сопротивления (индуктивность) статора;
X0 (L0) – реактивное сопротивления (индуктивность) намагничивания;
R20, X20 (L20) – активное и реактивное сопротивления (индуктивность) ротора при
скольжении равным нулю;
R21, X21 (L21) – активное и реактивное сопротивления (индуктивность) ротора для
заторможенного ротора.
Для определения параметров сделано допущение, что R1 = R20 и X1 = X20. Данное
предположение справедливо для большинства асинхронных двигателей, исключение могут
составлять двигатели малой мощности напряжением 0,4 кВ. Функция, определяющая зависимость
параметров ротора, а значит и моментной характеристики, от скольжения задана следующим
образом:
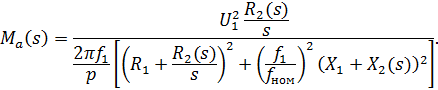
где a – коэффициент степени моментной характеристики,
который подбирается экспериментально.
Если характер моментной характеристики не известен, то a можно принять равным 1. Если
известно, что имеется минимум на характеристики или его отсутствие, то а следует
незначительно изменить в большую или меньшую сторону.
Электромагнитный момент асинхронного двигателя в именованных единицах (Дж) определяется с
учетом напряжения и частоты питающей сети f1 по формуле:
В модели
предусмотрена возможность задать момент сопротивления механизма через входной порт или
использовать встроенные зависимости, задав коэффициент загрузки Kz и тип
характеристики механизма (TypeMc):
если TypeMc = 0:
если TypeMc = 1:
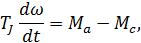
Уравнение движения ротора асинхронного двигателя представлено в виде (в относительных
единицах):
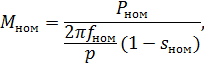
где приведенные моменты отнесены к номинальному моменту:
а
постоянная времени инерции определена через момент инерции:
Порты
Входные сигналы:
Напряжение на обмотке статора электродвигателя, U1, В;
Момент сопротивления механизма, Дж (используется, если свойству "Моделировать момент
сопротивления" задано значение "нет", в противном случае используются встроенные функции
момента сопротивления);