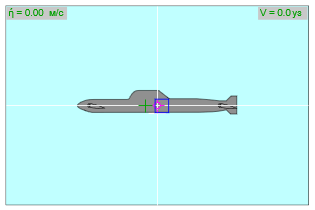
Основной экран с объектом управления
 |
 |
|
| в палитре | на схеме |
Описание
Блок предназначен для визуализации основного рабочего экрана пользователя. Блок отображает пространственное положение объекта управления, представленного на экране в виде условного изображения, а также значения текущего, заданного и предсказанного параметров маневрирования: курса и глубины. Блок также позволяет визуализировать работу кормовых и носовых горизонтальных рулей (КГР и НГР, соответственно) объекта управления.
Входные порты
Блок не имеет входных портов.
Выходные порты
Блок не имеет выходных портов.
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
| Текущее значение дифферента | Psi | Значение угла наклона объекта управления, отображаемого на экране | 0 | Вещественное |
| Параметр глубины погружения | Группа свойств, которая отвечает за визуализацию параметров глубины погружения | |||
| Заданное значение глубины | ZadEta | Заданное значение глубины погружения объекта управления. Отображается в виде синего квадрата, находящегося всегда по центру экрана | 0 | Вещественное |
| Текущее значение глубины | CurEta | Текущее значение глубины погружения объекта управления. Отображается в виде зеленого креста, находящегося по центру условного изображения объекта управления. Перемещение изображения по оси Y зависит от разницы между текущим и заданным значением глубины |
0 | Вещественное |
| Предсказанное значение глубины | PredEta | Предсказанного значение глубины погружения объекта управления. Отображается в виде розового креста | 0 | Вещественное |
| Параметр угла курса | Группа свойств, которая отвечает за визуализацию параметров угла курса | |||
| Заданное значение курса | ZadCourse | Заданное значение угла курса объекта управления. Отображается в виде синего квадрата, находящегося всегда по центру экрана | 0 | Вещественное |
| Текущее значение курса | CurCourse | Текущее значение глубины погружения объекта управления. Отображается в виде зеленого креста, находящегося по центру условного изображения объекта управления. Перемещение по оси X зависит от разницы между текущим и заданным значением курса |
0 | Вещественное |
| Предсказанное значение курса | PredCourse | Предсказанного значение угла курса объекта управления. Отображается в виде розового креста | 0 | Вещественное |
| Скорость хода | Vx | Текущее значение скорости хода объекта управления. Отображается в правом верхнем углу экрана | 0 | Вещественное |
| Скорость изменения глубины | pEta | Текущее значение скорости изменения глубины погружения объекта управления. Отображается в левом верхнем углу экрана | 0 | Вещественное |
| Настройка масштаба глубины погружения | Группа свойств, которая отвечает за настройку масштаба глубины погружения | |||
| Автоматическое изменение масштаба глубины | AutModeScaleEta | Режим автоматического изменения масштаба глубины погружения объекта управления в зависимости от разницы между текущим и заданным значением глубины | Да | Двоичное |
| Масштаб глубины 1 | ScaleEta1 | Выбор первого режима масштабирования глубины погружения объекта управления. Доступен для выбора, если режим автоматического изменения масштаба глубины деактивирован | Да | Двоичное |
| Масштаб глубины 2 | ScaleEta2 | Выбор второго режима масштабирования глубины погружения объекта управления. Доступен для выбора, если режим автоматического изменения масштаба глубины деактивирован | Нет | Двоичное |
| Масштаб глубины 3 | ScaleEta3 | Выбор третьего режима масштабирования глубины погружения объекта управления. Доступен, если режим автоматического изменения масштаба глубины деактивирован | Нет | Двоичное |
| Положение рулей | Группа свойств, которые отвечают за визуализацию положения рулей объекта управления | |||
| Положение НГР | StateNgr | Режим отображения условного изображения носовых горизонтальных рулей ("Выдвинуты" / "Убраны") | Выдвинуты | Перечисление |
| Угол перекладки НГР | AngleNgr | Значение угла перекладки носовых горизонтальных рулей. Отображается в виде изменения угла наклона условного изображения НГР. Параметр отображается, если выбранным режимом отображения положения НГР является "Выдвинуты" | 10 | Вещественное |
| Угол перекладки КГР | AngleKgr | Значение угла перекладки кормовых горизонтальных рулей. Отображается в виде изменения угла наклона условного изображения КГР | 10 | Вещественное |
| Выбор условного изображения объекта управления | TypeShip | Выбор условного изображения объекта управления. Доступно три типа | Тип 1 | Перечисление |
| Цвет фона | BackgroundColor | Цвет фона экрана | 16777152 | Цвет |
Параметры
Блок не имеет параметров.