Продольное движение c заданным углом тангажа
 |
 |
|
| в палитре | на схеме |
Описание
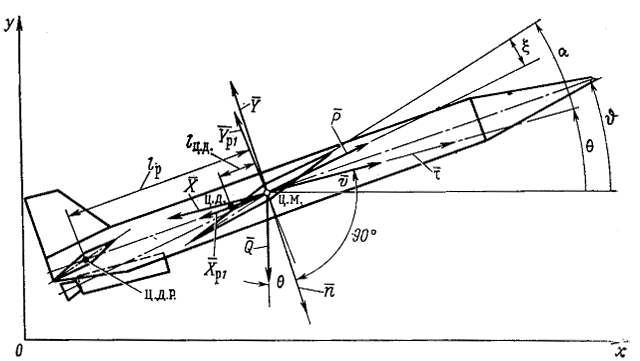
| Сила | Касательная составляющая (проекция на ось τ) | Нормальная составляющая (проекция на ось n) |
|---|---|---|
| Сила тяги | Pcos(α-ξ) | -Psin(α-ξ) |
| Лобовое сопротивление | -X | - |
| Подъемная сила | - | -Y |
| Сила тяжести | -mgsinθ | mgcosθ |
| Потеря тяги на рулях | -Xp1cos(ϑ-θ) | Xp1sin(ϑ-θ) |
| Управляющая сила | -Yp1cos(ϑ-θ) | -Yp1cos(ϑ-θ) |
Напишем уравнения движения в проекциях на касательную и нормаль:
Уравнение вращательного движения будет иметь вид:
где Jz - экваториальный момент инерции самолета-снаряда относительно оси 0Z1, которая в рассматриваемом случае совпадает с осью Оz. К написанным трем уравнениям надо добавить два очевидных кинематических уравнения.
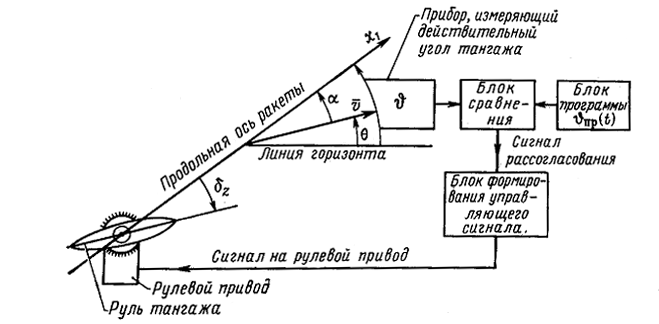
В процессе работы блок программы вырабатывает электрический сигнал, соответствующий программному значению угла тангажа в данный момент времени ϑpr(t). В то же время чувствительный элемент измеряет действительный угол тангажа ϑ и передает соответствующий сигнал в блок сравнения, который после сравнения сигналов, пропорциональных программному и действительному углам тангажа, выдает сигнал рассогласования. Усиленный и преобразованный в блоке формирования управляющего сигнала, он передается на рулевой привод, который соответствующим образом поворачивает органы управления. При этом направление движения ракеты изменится так, чтобы парировать возникшее отклонение от программной траектории. Угол рассогласования по тангажу может быть приближенно связан с углом поворота управляющих органов с помощью первого слагаемого уравнения управления:
Где k0ϑ статический коэффициент системы управления.
Тогда
Отсюда
По малости угла атаки примем:
В итоге система уравнений описывающая продольный управляемый полет ЛА:
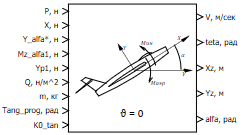
Входные порты
- P - вектор силы тяги в связанной системе координат [Н];
- X - лобовое сопротивление сил в полускоростной системе координат [Н];
- Y_alfa* - подъемная сила в полускоростной системе координат [Н];
- Mz_alfa1 - проекция момента на ось 0Z1 в связанной системе координат [Нм];
- Yp1 - сумма сил создаваемая управляющими органами в связанной системе координат [Н];
- Q - скоростной напор [Н/м^2];
- m - масса [кг];
- Tang_prog - значение программного угла [рад];
- K0_tan - коэффициент системы управления;
- Jz1 - моменты инерции ЛА [кг*м^2];
- m - масса ЛА [кг].
Выходные порты
- V - модуль скорости ЛА [м/c];
- teta - угол наклона траектории [рад];
- Xz, Yz - координаты продольного движения ЛА [м];
- alfa - угол атаки [рад].
Свойства
- L - длина ЛА размерность [м];
- Lp - расстояние от центра давления управляющих органов до центра масс ЛА [м];
- S - значение площади ЛА, необходимое для определения момента вдоль оси 0Z1 [м^2];
- V0 - начальное значение скорости ЛА [м/сек];
- X0, Y0 - начальные значения координат [м];
- Teta0 - начальное значение угла наклона траектории [град].
Параметры
Блок не имеет параметров.
Сопутствующие материалы
- Динамика полета беспилотных летательных аппаратов. А.А. Лебедев, Л.С. Чернобровкин Изд. "Машиностроение" 1973
- Внешняя баллистика. А.А. Дмитриевский Изд. "Машиностроение" 1972