Продольное движение
 |
 |
|
| в палитре | на схеме |
Описание
При разделении сложного движения ракет на продольное и боковое принимают, что в первом приближении продольное движение не зависит от бокового. В соответствии с этим в уравнениях для определения характеристик продольного движения учитывают только те силы и моменты, которые действуют в плоскости стрельбы. При определении же характеристик бокового движения ракеты считать его независимым от продольного нельзя, поэтому в уравнения включаются все силы и моменты, которые в той или иной степени могут вызвать отклонения ракеты от плоскости стрельбы.
Система уравнений, описывающую продольное (плоское) движение центра масс ракеты в полускоростной системе координат:
Тригонометрическое уравнение в системе, связывающее углы тангажа, наклона траектории и атаки в ряде случаев удобнее заменить равенством
Полученная система является замкнутой и может быть решена.
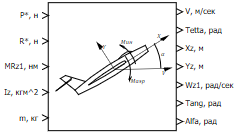
Входные порты
- P - вектор силы тяги в полускоростной системе координат [Н];
- R - вектор аэродинамических сил в полускоростной системе координат Н];
- MR - вектор аэродинамических моментов в связанной системе координат [Нм];
- Jz1 - моменты инерции ЛА [кг*м^2];
- m - масса ЛА [кг].
Выходные порты
- V - модуль скорости ЛА [м/c];
- Teta - угол наклона траектории [рад];
- Xz, Yz - координаты на оси земной системы координат [м];
- Wz1 - угловая скорость вращения ЛА относительно связанных осей [рад/сек];
- Tang - угол тангажа [рад];
- Alfa - угол атаки [рад].
Свойства
- V0 - начальное значение скорости ЛА размерность [м/сек];
- Teta0 - начальное значение угла наклона траектории размерность [град];
- Tang0 - начальное значение угла тангажа размерность [град];
- Wz0 - начальные значения скоростей вращения ЛА [рад/сек];
- X0, Y0 - начальные значения координат размерность [м].
Параметры
- Текущее положение РПН.
Сопутствующие материалы
- Динамика полета беспилотных летательных аппаратов. А.А. Лебедев, Л.С. Чернобровкин Изд. "Машиностроение" 1973
- Внешняя баллистика. А.А. Дмитриевский Изд. "Машиностроение" 1972