Продольное движение в перегрузках
 |
 |
|
| в палитре | на схеме |
Описание
Данный блок основан на уравнениях полного продольного движения, записанных в полусвязанной системе координат в форме т.н. уравнений в "перегрузках". В данный блок в качестве параметра введен переключатель Swfg, управляющий учетом фугоидного движения. При Swfg = 1 рассматривается полное продольное движение. При Swfg = 0 рассматривается короткопериодическое движение. Переход к уравнениям короткопериодического движения осуществляется путем отключения интегрирования уравнений для скорости и высоты.
где: ϑ, ωz – угол тангажа; ωz – угловая скорость тангажа; θ – угол наклона траектории.
Правые части уравнений движения (входы блока) могут быть рассчитаны, например, по следующим формулам:
относительный момент тангажа Mza = mzqSbA;
нормальная перегрузка Ya = Cy·q·S;
касательная перегрузка Xa = Cx·q·S.
где: T – суммарная тяга двигателей; φeng, ΔφThr - угол "заклинения" двигателя и угол поворота вектора тяги; xeng - "плечо" тяги двигателя относительно центра тяжести самолета.
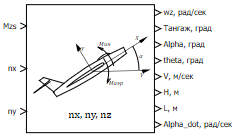
Входные порты
- nx, ny – проекции вектора перегрузки на оси полусвязанной системы координат (nx, ny);
- Mzs – относительный момент тангажа Mzs = Mz/Iz.
Выходные порты
- wz – угловая скорость тангажа ωz [рад/сек];
- Tang – угол тангажа размерность [град] диапазон (–90°< ϑ <90°);
- Alpha – угол атаки α, град (т.н. кинематический угол атаки без учета действия ветра) [град];
- teta – угол наклона траектории самолета θ [град];
- V – скорость полета V [м/сек] ;
- H – высота полета H [м/сек];
- L – дальность L [м/сек];
- Alphat – производная угла атаки α [рад/сек].
Свойства
- Swfg – переключатель для перехода от полных уравнений движения (Swfg=1) к уравнениям короткопериодического движения (Swfg=0);
- Wz10 – начальная угловая скорость тангажа размерность [рад/сек];
- Tang0 – начальный угол размерность [град];
- teta0 – начальный угол наклона траектории размерность [град];
- H0 – начальная высота размерность [v];
- V0 – начальная скорость полета размерность [м/сек].
Параметры
Блок не имеет параметров.