Полная система уравнений движения с использованием кинематических уравнений в параметрах Родрига-Гамильтона
 |
 |
|
| в палитре | на схеме |
Описание
Движение ракет будем рассматривать в системе координат жестко 0XзYзZз связанной с Землей. При этом для упрощения задачи влияние Земли учтем введением постоянного по величине и направлению ускорения от силы тяжести, пренебрегая кориолисовым ускорением; кривизну Земли также учитывать не будем. При написании правых частей уравнений будем учитывать составляющие силы тяги, силы тяжести, аэродинамических и управляющих сил.
Система уравнений, описывающую движение центра масс ракеты в полускоростной системе координат 0XY*Z*:
Где, Px, Py*, Pz* - проекции силы тяги на полускоростные оси координат, Qx, Qy* - проекции силы тяжести на полускоростные оси координат, Xp, Yp*, Zp* - проекция аэродинамических управляющих сил на полускоростные оси координат, X, Y*, Z* - проекция аэродинамических сил на полускоростные оси координат.
Уравнения вращательного движения ракет и самолетов обычно пишут в проекциях на связанные оси координат.
где ∑Mx1; ∑My1; ∑Mz1 - суммы проекций моментов внешних сил и силы тяги на связанные оси координат (без учета управляющих сил); ∑Mр x1; ∑Mр y1; ∑Mр z1 - суммы проекций моментов управляющих сил на связанные оси координат.
Jx1; Jy1; Jz1 - моменты инерции вдоль главных осей ЛА.
Для установления связей между производными и угловыми скоростями wXl, wyl и wzl, воспользуемся:
При определении величин аэродинамических сил в процессе решения пространственной задачи движения ракеты надо знать величины углов α, β и γс.
Определяя направляющие косинусы последовательного перехода от связанных осей к скоростным, от скоростных к полускоростным и от полускоростных к земным и приравнивая их направляющим косинусам непосредственного перехода от связанных осей к земным, получим следующие соотношения между углами:
Отсюда:
Если теперь использовать выражения для проекций вектора скорости центра масс ракеты на оси земной системы координат, то получим:
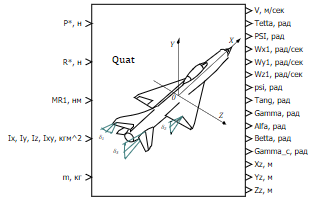
Входные порты
- P* – вектор силы тяги двигателя в полускоростной системе координат [Н];
- R* – вектор аэродинамических сил в полускоростной системе координат [Н];
- MR1 – вектор аэродинамических моментов в связанной системе координат [Нм];
- Jx1, Jy1, Jz1 – моменты инерции ЛА размерность [кг*м^2].
Выходные порты
- V - модуль скорости ЛА [м/c];
- Teta - угол наклона траектории [рад];
- PSI - угол поворота траектории [рад];
- Wx1, Wy1, Wz1 - угловые скорости вращения ЛА относительно связанных осей [рад/сек];
- psi - угол рысканья [рад];
- Tang - угол тангажа [рад];
- Gamma - угол крена [рад];
- Alfa - угол атаки [рад];
- Betta - угол скольжения [рад];
- Gamma_с - угол крена (угол между плоскостями 0X1Y1 и 0XY*) [рад];
- Xz, Yz, Zz - координаты на оси земной системы координат [м].
Свойства
- BigPsi0 - начальное значение угла поворота траектории размерность [град];
- Gamma0 - начальное значение угла крена размерность [град];
- Psi0 - начальное значение угла рысканья размерность [град];
- Tang0 - начальное значение угла тангажа размерность [град];
- Teta0 - начальное значение угла наклона траектории размерность [град];
- V0 - начальное значение скорости ЛА размерность [м/с];
- Wx0, Wy0, Wz0 - начальные значения скоростей вращения ЛА [рад/сек];
- X0, Y0, Z0 - начальные значения координат размерность [м].
Параметры
Блок не имеет параметров.
Сопутствующие материалы
- Динамика полета беспилотных летательных аппаратов. А.А. Лебедев, Л.С. Чернобровкин Изд. "Машиностроение" 1973
- Внешняя баллистика. А.А. Дмитриевский Изд. "Машиностроение" 1972