Полное движение с учетом вращения Земли
 |
 |
|
| в палитре | на схеме |
Описание
Допустим, что управление в каждый момент времени совмещает продольную ось ракеты с вектором скорости. При хорошо работающем управлении колебания ракеты относительно центра масс можно не учитывать и рассматривать движение ракеты как материальной точки.
Дифференциальное уравнение движения центра масс в инерциальной системе координат и обозначениях формулы имеет вид:
В относительном движении:
Проекция силы тяги на координатные оси будет равна произведению силы Тяги на косинус угла между направлением вектора силы и соответствующей осью. Косинусы углов будут равны соответственно:
где: vreg. x, vreg.y и vreg. z - проекции скорости относительного движения центра массы ракеты на координатные оси. Опуская в дальнейшем индексы "отн", получим:
Проекции силы тяги определяются формулами:
Проекции аэродинамических сил на координатные оси будут равны силе R, умноженной на косинусы углов между направлением вектора силы тяги и соответствующей координатной осью:
Составляющие силы тяготения Земли определим, пользуясь формулой для ускорения силы земного тяготения, полученной в предположении, что Земля - шар:
где т0 - ускорение силы земного тяготения у поверхности Земли; RE - радиус Земли; r - расстояние от центра масс ракеты до условного центра Земли.
Составляющие силы земного тяготения будут равны:
где x/r, y/r, z/r - косинусы углов между направлением действия силы FT и соответствующей координатной осью.
Используя данные формулы, получим систему дифференциальных уравнений, описывающих движение центра масс ЛА:
и
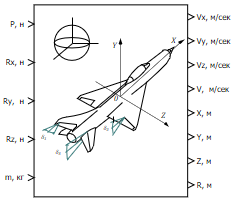
Входные порты
- P - значение силы тяги [Н];
- Rx, Ry, Rz - проекции аэродинамических сил на соответствующие оси геоцентрической СК [Н];
- m - масса ЛА [кг].
Выходные порты
- Vx, Vy, Vz - проекции относительной скорости на оси геоцентрической СК [м/сек];
- V - модуль вектора относительной скорости [м/сек];
- X, Y, Z - геоцентрические координаты ЛА [м];
- R - радиус вектор ЛА относительно центра сферической Земли [м].
Свойства
- Vx0, Vy0, Vz0, X0, Y0, Z0 - начальное состояние ЛА - начальные значения трех скоростей по соответствующим осям геоцентрической СК и трех координат.
Параметры
Блок не имеет параметров.
Сопутствующие материалы
- Динамика полета беспилотных летательных аппаратов. А.А. Лебедев, Л.С. Чернобровкин Изд. "Машиностроение" 1973
- Внешняя баллистика. А.А. Дмитриевский Изд. "Машиностроение" 1972