Блок реализует модель двигателя постоянного тока. Используется в цепях c элементами
библиотеки ЭЦ - Динамика (ЭЦД). Модель двигателя постоянного тока основана на схеме замещения,
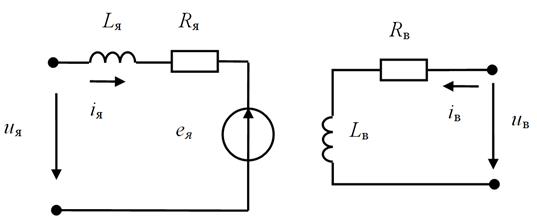
приведённой на рисунке 1. Насыщение магнитопровода в модели не учитывается.
Рисунок 1. Схема замещения двигателя постоянного тока: uя, uв - напряжение на якорной обмотке
двигателя и обмотке возбуждения; eя - ЭДС якоря; iя, iв - ток якоря и ток обмотки
возбуждения; Rя, Rв - активное сопротивление якорной цепи и обмотки возбуждения; Lя, Lв -
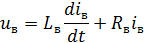
индуктивность якорной цепи и обмотки возбуждения.Уравнения, которыми описываются процессы в двигателе постоянного тока, имеют следующий
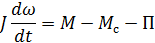
вид:
где: J - суммарный момент инерции якоря и нагрузки; ω - скорость вращения
вала двигателя; M - электромагнитный момент двигателя; Mс- момент сопротивления
движению; kяв– коэффициент связи обмоток; П - механические потери, определяемые как
процент от номинального момента по формуле: