ЭЦС - Двигатель асинхронный 3-фазный (VBR-модель, 1 л. сх.)
 |
 |
|Си| |
| в палитре | на схеме |
Блок реализует модель трехфазного асинхронного двигателя. Используется совместно c элементами библиотеки "ЭЦ - Статика (ЭЦС) 2.0".
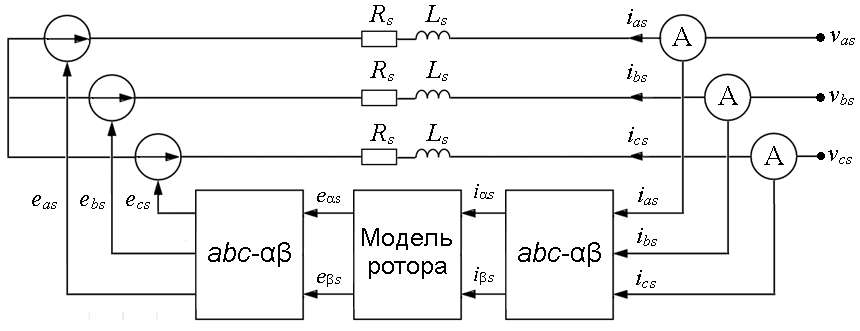
В данной модели статор машины представлен в виде трехфазной цепи, каждая фаза которой состоит их управляемого источника напряжения и RL-ветви, а модель ротора при этом вынесена из электрической цепи.
Преимуществом VBR-модели является то, что она обеспечивает устойчивость расчёта при отключении двигателя от источника, в то время как для модели в dq-координатах требуется подключение снаббера (R или RC-ветвь) и/или существенное уменьшение шага интегрирования.
VBR-модель АД c одним контуром ротора основана на следующих уравнениях:
- Rs, Rr – активные сопротивления статора и ротора;
- Lσs, Lσr – индуктивности рассеяния статора и ротора;
- Lm – индуктивность цепи намагничивания;
- uαs, iαs, Ψαs – проекции напряжения, тока и потокосцепления статора на ось α;
- uαr, iαr, Ψαr – проекции напряжения, тока и потокосцепления ротора на ось α;
- uβs, iβs, Ψβs – проекции напряжения, тока и потокосцепления статора на ось β;
- uβr, iβr, Ψβr – проекции напряжения, тока и потокосцепления ротора на ось β;
- Ψαm, Ψβm– проекции потокосцепления намагничивания на оси α и β;
- ωr – угловая частота вращения ротора;
- Zp – число пар полюсов;
- Te – электромагнитный момент.
Уравнение движения ротора:
- Tm – момент сопротивления;
- J – момент инерции;
- F – коэффициент вязкого трения.
В модели АД учитывается эффект вытеснения тока в обмотке ротора. Насыщение и потери в стали не учитываются. Ротор – короткозамкнутый. Все величины и параметры АД приведены к статору.
В блоке предусмотрена возможность расчета параметров схемы замещения по каталожным данным АД. Для этого необходимо переместить курсор в поле "Значение" свойства "Рассчитать параметры схемы замещения" и нажать появившуюся кнопку.
Для записи рассчитанных значений в свойства модели необходимо нажать кнопку свойства "Записать расчетные параметры в свойства".
По каталожным данным предварительно определяют следующие параметры:
- Rs, Xσs – активное и реактивное сопротивления статора;
- Xm – реактивное сопротивления намагничивания;
- Rr0, Xr0 – активное и реактивное сопротивления ротора при скольжении равным нулю;
- Rr1, Xr1 – активное и реактивное сопротивления ротора для заторможенного ротора.
Для определения параметров сделано допущение, что Rs = Rr0 и Xs = Xr0. Данное предположение справедливо для большинства асинхронных двигателей, исключение могут составлять двигатели малой мощности напряжением 0,4 кВ. Методика расчета подробно изложена в [1].
Функция, определяющая зависимость параметров ротора, а значит и моментной характеристики, от скольжения задана следующим образом:
где a– коэффициент степени моментной характеристики, который подбирается экспериментально.
Если характер моментной характеристики не известен, то a можно принять равным 1. Если известно, что имеется минимум на характеристики или его отсутствие, то а следует незначительно изменить в большую или меньшую сторону.
Момент сопротивления на входном порте Tm задается в относительных единицах, приведенным к номинальному моменту АД.
На порт выхода P_out выводится вектор значений параметров АД. Первый элемент вектора – ωr скорость, р/с, второй – Te электромагнитный момент, о.е.
Значение свойства "Частота" должно соответствовать частоте питающей сети. При необходимости, частоту можно задавать через порт входа f при значении свойства "Задать частоту через порт" равным "Да".
Дополнительной опцией блока является возможность использования его для расчёта в мгновенных значениях.
Метод расчёта задается свойством "Метод расчета". При значении "Из настроек контейнера" будет использоваться метод, указанный в блоке "ЭЦС - Контейнер метода расчета", в который входит данный блок. Остальные значения позволяют задавать способ расчёта для блока вне зависимости от свойств контура.
Порты
- 1 – порт трехфазной однолинейной электрической связи.
Входные порты
- Tm – порт входа математической связи задания момента сопротивления в о.е.;
- f – порт входа математической связи задания частоты питающей сети. (порт появляется при задании значения "Да" свойству "Задать частоту через порт").
Выходные порты
- P_out – порт выхода для получения параметров АД.
Свойства
Номинальные:
- Тип;
- Номинальная мощность, кВт;
- Номинальное напряжение, В;
- Номинальная частота питающей сети, Гц;
- Номинальная частота вращения, об/мин;
- Число пар полюсов;
- Момент инерции, кг·м2;
- Номинальный момент, Н·м – расчетное значение для справки;
Схема замещения:
- Сопротивления статора [Хls, Rs], Ом – параметры схемы замещения;
- Сопротивление намагничивания [Хm], Ом – параметры схемы замещения;
- Сопротивление ротора при s = 0 [Хlr0, Rr0], Ом – параметры схемы замещения;
- Сопротивление ротора при s = 1 [Хlr1, Rr1], Ом – параметры схемы замещения;
Расчет параметров схемы замещения:
- Номинальный коэффициент мощности (Cosf);
- Номинальный КПД, %;
- Кратность максимального момента, о.е.;
- Кратность пускового момента, о.е.;
- Кратность пускового тока, о.е.;
- Коэффициент степени моментной характеристики;
- Рассчитать параметры схемы замещения;
- Записать расчетные параметры в свойства;
- Сопротивления статора [Хls, Rs], Ом – расчетные значения;
- Сопротивление намагничивания [Хm] – расчетные значения, Ом;
- Сопротивление ротора при s = 0 [Хlr0, Rr0] – расчетные значения, Ом;
- Сопротивление ротора при s = 1 [Хlr1, Rr1] – расчетные значения, Ом.
Дополнительные:
- Блокировать отрицательную скорость вращения ротора;
- Коэффициент вязкого трения, о.е.;
- Частота, Гц;
- Задать частоту через порт;
- Цвет;
- Шрифт;
- Метод расчета.
Параметры
- Частота вращения, об/мин.;
- Электромагнитный момент, о.е.
Литература
1. Сыромятников И.А. Режимы работы асинхронных и синхронных двигателей/Под ред. Л.Г. Мамиконянца. – 4-е изд., переработ. и доп. – М.: Энергоатомиздат, 1984. – 240 с.