Прием пакетов данных CAN
 |
 |
|Си| |
| в палитре | на схеме |
Описание
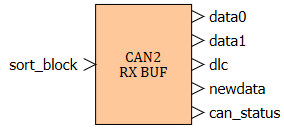
Блок приема данных CAN из выбранного в свойствах блока буфера. Если включена опция TX_EN = Да, то после приема сообщения в прерывании будет отправлена ответная посылка в шину.
Можно использовать для программирования двух типов микроконтроллеров 1986BE1T и 1986BE9X.
Основные характеристики контроллера CAN приведены в спецификациях 1986BE1T.pdf и 1986BE9X.pdf.
Входные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| sort_block | Порт необходим для сортировки (определения порядка выполнения) блока. | Математическая |
Выходные порты
| Имя | Описание | Тип линии связи |
|---|---|---|
| data0 | Данные, полученные по CAN интерфейсу размер 4 Байта. | Математическая |
| data1 | Данные, полученные по CAN интерфейсу размер 4 Байта. | Математическая |
| dlc | Длина пакета данных. | Математическая |
| newdata | Пришли новые данные. | Математическая |
| can_status | Общий статус CAN контроллера. | Математическая |
Свойства
| Название | Имя | Описание | По умолчанию | Тип данных |
|---|---|---|---|---|
|
Фильтр ID |
FILTER_ID | Возможные значения: целое число |
10*2^18 = 2621440 |
Целое |
| Маска | MASK_ID | Возможные значения: целое число |
2047*2^18 = 536608768 |
Целое |
| Номер буфера | NUM_BUF | Возможные значения: целое число 0..31 |
0 | Целое |
| Перезапись приемного буфера | OVER_WRITE | Возможные значения: DISABLE ENABLE |
DISABLE | Перечисление |
| Выбор CAN контроллера | CAN_NUM | Возможные значения: CAN1 CAN2 |
CAN2 | Перечисление |
| Разрешить выдачу данных на шину |
TX_EN |
Возможные значения: Да/Нет |
Нет | Двоичное |
| Выбор буферов для передачи данных | BUF_ARR | Возможные значения: CAN_BUFFER_0…CAN_BUFFER_31 |
CAN_BUFFER_1 | Множество |
Параметры
Блок не имеет параметров.