Методы проектирования фильтров
В данном разделе справочной системы описываются основные методы проектирования БИХ- и КИХ-фильтров.
Методы построения структур БИХ-фильтров
Пусть передаточная функция прямой формы цифрового фильтра определяется отношением вида:
Используя обратное Z-преобразование, возможно получить прямую форму реализации БИХ-цепи M-го порядка:
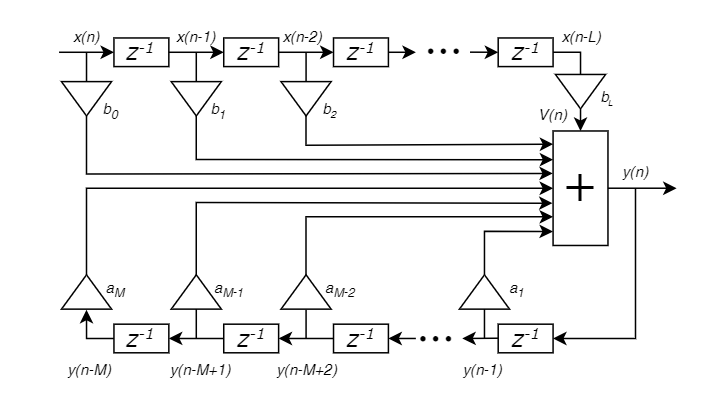
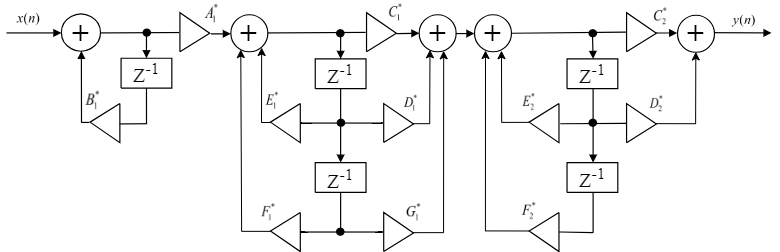
Верхняя половина структуры цифровой цепи прямой формы реализует нули передаточной функции, а нижняя половина - ее полюсы. Фильтры, формирующие нули и полюсы, соединены последовательно.
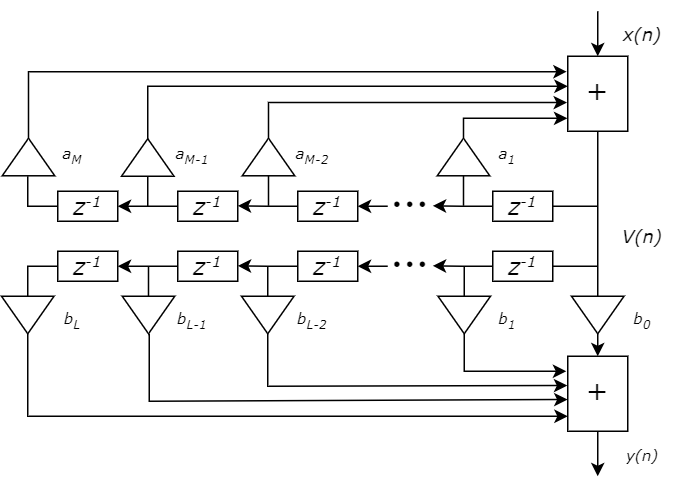
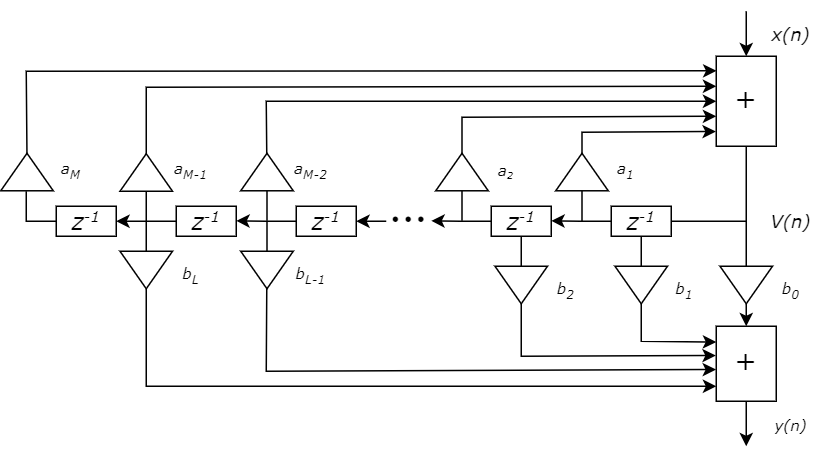
Каноническая форма позволяет уменьшить емкость памяти данных до двух раз. Однако прямая и каноническая формы используются на практике только для фильтров, порядок которых меньше пяти, M < 5, так как с увеличением порядка M многократно увеличивается чувствительность частотных характеристик к неточному представлению коэффициентов, и появляется проблема устойчивость их работы.
На практике чаще используется последовательная, или, но реже, параллельная формы реализации БИХ-цепи в виде последовательного и параллельного соединения звеньев первого и второго порядков.
Параллельная форма
N1 – число фильтров первого порядка;
N2 – число фильтров второго порядка.
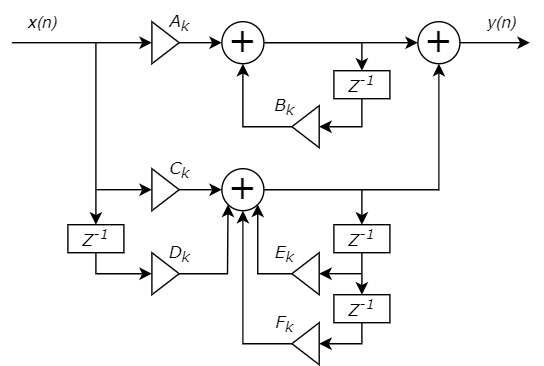
Последовательная форма
При представлении числителя и знаменателя передаточной функции прямой формы в форме произведения простых сомножителей первого и второго порядка, возможно получить следующее выражение:
- Многократное уменьшение чувствительности характеристик БИХ-цепи к неточному представлению коэффициентов, так как порядок каждого отдельного цифрового звена фильтра не превышает значение "2".
- Возможность оптимизации порядка соединения фильтров 1-го и 2-го порядков для минимизации уровня собственных шумов.
- Возможность простой многопроцессорной реализации цифрового фильтра, работающего в режиме реального времени на высокой частоте дискретизации.
Методы построения КИХ-фильтров. Линейная свертка
Одним из широко распространенных методов построения КИХ-фильтров является метод линейной свертки.
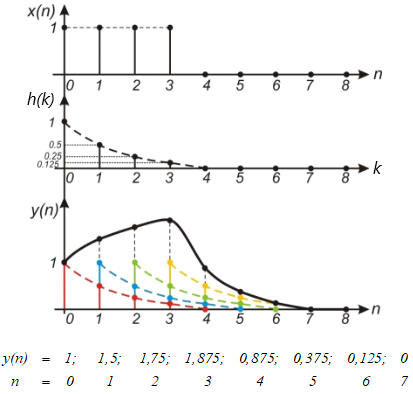
Реализация свертки в прямой форме предполагает, что для КИХ-фильтра N-го порядка используется вычисление выхода сигнала y(n) по выражению вида:
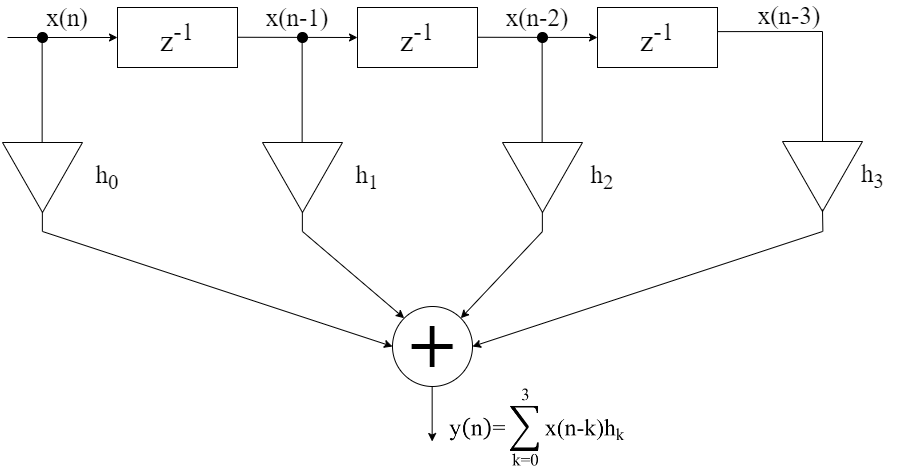
Реакция цифрового фильтра y(n), согласно приведенному выше выражению, представляет собой сумму сдвинутых по времени и взвешенных входной последовательностью x(n - k) отсчетов импульсной характеристики h(k).
Билинейное преобразование
Основной метод расчета передаточной характеристики цифрового фильтра H(z) строится на основе передаточной характеристики аналогового фильтра H(s) - прототипа. Такой подход называется методом билинейного Z-преобразования.
Он осуществляется подстановкой:
где Т - период дискретизации сигнала.
Если s = 0, то z = 1. Если s = σ только вещественно, то z = (2 + σ·T)/(2 - σ·T), причем при s = σ < 0 модуль |z| < 1, а при s = σ > 0 модуль |z| > 1.
Если s = j·ω только мнимо, то получается отношение комплексно-сопряженных чисел, модуль которого всегда равен |z| = 1.
Если s = σ + j·ω, то при σ < 0 модуль |z| < 1, а при σ > 0 модуль |z| > 1.
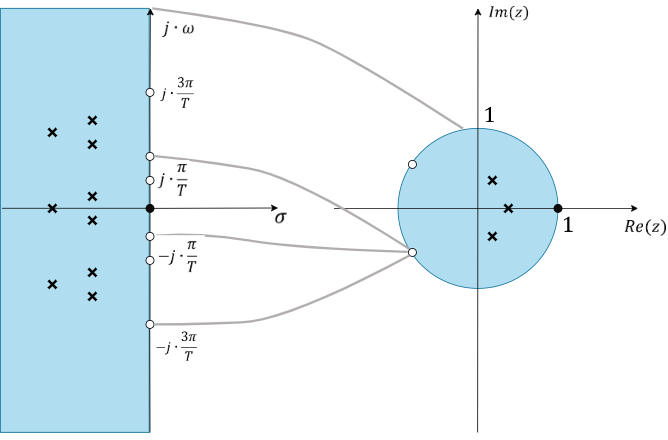
Таким образом, билинейное Z-преобразование позволяет осуществить переход из s плоскости в z-плоскость при помощи дробно-рациональной подстановки. Поскольку в числителе и знаменателе этой подстановки полиномы только первой степени, то при переходе от передаточной характеристики аналогового фильтра H(s) к цифровому фильтру с передаточной характеристикой H(z) максимальная степень полиномов числителя и знаменателя не изменится, а значит не изменится и порядок фильтра.
Литература
- Баскаков С. И. Радиотехнические цепи и сигналы: Учеб. для вузов по специальности "Радиотехника" / С. И. Баскаков.-4-е изд., перераб. и доп. - М.: Высшая школа, 2003. - 464 с.
- Иванов М.Т. Теоретические основы радиотехники: Учебное пособие / М.Т. Иванов, А.Б. Сергиенко, В.Н. Ушаков, Под ред. В.Н. Ушакова. - М.: Высшая школа, 2002. - 306 с.
- Мошиц Г., Хорн П. Проектирование активных фильтров: Пер. с англ. – М.: Мир, 1984. – 320 с.