Блок выполняет поиск линий разметки в заданной области по следующему алгоритму:
На вход блока поступают бинарное изображение и цветное изображение для отображения
результатов работы.
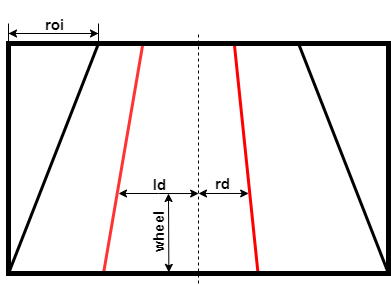
Для учета перспективного вида используется свойство «Трапецеидальность области
видимости, пиксели». На рисунке (Рисунок 1) данный
параметр обозначен как «roi».
Полученная область разбивается на заданное количество равных горизонтальных участков,
которое определяется значением свойства «Количество гистограмм».
Для каждого участка строится гистограмма яркости, максимальные значения для левой и
правой части которой используются как начальные точки для поиска линий.
Расстояние до линий рассчитывается как длина отрезка от центра кадра до соответствующих
линий на высоте, определяемой значением свойства «Уровень для расчета расстояния
до линий разметки, пиксели». На рисунке (Рисунок 1) данный
параметр обозначен как «wheel».
Выходные сигналы представляют собой графическое представление результатов и расстояния
до найденной правой и левой линии. Указанные расстояния обозначены на рисунке (Рисунок 1) как
«rd» и «ld» соответственно.
Рисунок 1. Детектирование разметки.
Входные порты
Имя
Описание
Тип линии связи
mask
Входная бинарная матрица изображения
Изображение
img_in
Входная матрица цветного изображения для отрисовки
Изображение
Выходные порты
Имя
Описание
Тип линии связи
img_out
Матрица изображения с отрисованными результатами
Изображение
distance_R
Расстояние до правой найденной линии, выраженное в пикселях