Разработка цифровой системы управления опорно-поворотным устройством
Лабораторная работа №4 по курсу "Компьютерное моделирование технических систем автоматического управления"
Цель работы
- Расширить набор навыков работы в SimInTech для исследования цифровых систем управления техническими объектами
Задачи работы
- Углубить понимание отдельных понятий и вопросов теории автоматического управления цифровыми системами (цифровая система, дискретный закон управления, аналого-цифровое и цифро-аналоговое преобразование, дискретный ПИД-регулятор и другие)
- Закрепить процедуры формирования структурной схемы модели, выбора метода и параметров интегрирования, ввода свойств блоков, вывода данных расчета
- Проследить с помощью компьютерного эксперимента влияние периода квантования и параметров передаточной функции на показатели качества контура управления
- Оформить отчет о результатах исследования
Объект исследования
В работе рассматривается система управления наземным опорно-поворотным устройством (ОПУ), обеспечивающим наведение технического оборудования на подвижный объект. В конкретных технических системах таким оборудованием, расположенным на ОПУ, может быть, например, антенна приема данных дистанционного зондирования Земли от спутника, солнечная батарея гелиоэнергетической установки, антенна радиолокационной станции слежения за целью и подобные.
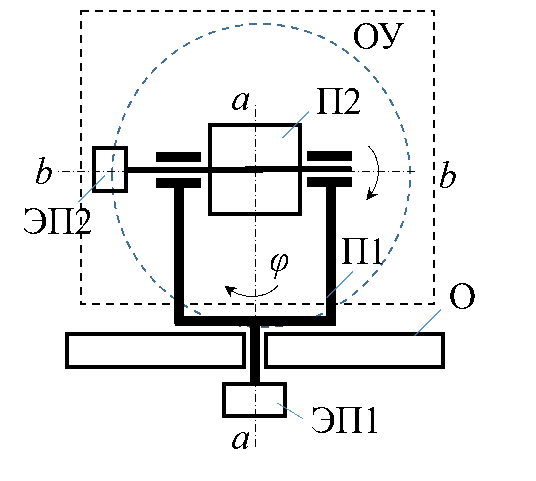
С точки зрения процесса наведения антенна или солнечная батарея является объектом управления с двумя задающими воздействиями, т.е. автоматическая система наведения должна иметь два взаимосвязанных контура управления: контур управления по азимуту и контур управления по углу места.
В данной работе предполагается, что контуры можно считать независимыми, и для простоты рассматривается только один контур – контур управления ОПУ по азимуту.
- статическая ошибка Δφст = 0
- время регулирования при пятипроцентной "трубке" t ≤ 10 c
- перерегулирование σ ≤ 20%
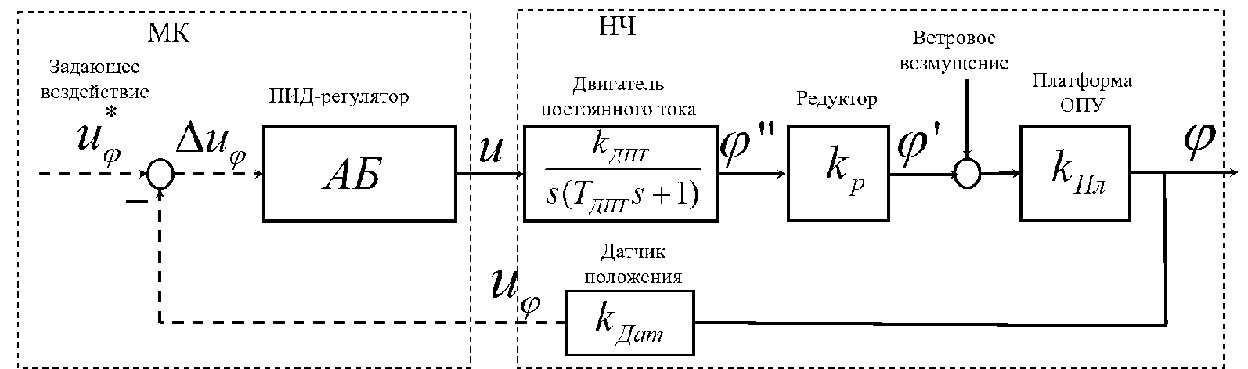
Принято, что для обеспечения заданных показателей качества АБ формирует ПИД-закон управления.
Как известно, классический аналоговый ПИД-регулятор имеет передаточную функцию
- kP, kI и kD – коэффициенты пропорционального, интегрального и дифференциального каналов
- T0– малая постоянная времени инерционного звена
При дискретизации преобразуется к виду:
где
Формула задает выражение для передаточной функции дискретного ПИД-регулятора.
Платформа ОПУ жестко связана с выходным валом редуктора, поэтому kПл = 1. Варианты числовых значений других параметров структурной схемы для учебных целей приведены в таблице (Таблица 1). В этой таблице kв – коэффициент передаточной функции ОПУ по возмущению.
| Вариант | Объект управления | Габариты, м | kДПТ, град/с/в | TДПТ, с | kP | kВ | kДат, в/град |
|---|---|---|---|---|---|---|---|
| 1 | СБ | 0.7 x 0.7 | 185 | 0.24 | 0.00346 | 0.28 | 0.5 |
| 2 | СБ | 0.8 x 0.8 | 205 | 0.96 | 0.00346 | 0.3 | 0.5 |
| 3 | СБ | 1 x 1 | 222 | 1.78 | 0.00346 | 0.25 | 0.5 |
| 4 | СБ | 1.5 x 1.5 | 192 | 1.56 | 0.00346 | 0.3 | 0.5 |
| 5 | СБ | 2 x 2 | 206 | 1.71 | 0.00346 | 0.25 | 0.5 |
| 6 | Антенна | D 2.4 | 100 | 1.50 | 0.00437 | 0.28 | 0.5 |
| 7 | Антенна | D 3.6 | 110 | 3.69 | 0.00832 | 0.3 | 0.5 |
| 8 | Антенна | D 5 | 188 | 7.71 | 0.00871 | 0.25 | 0.5 |
| 9 | Антенна | D 7 | 470 | 24.62 | 0.00871 | 0.3 | 0.5 |
| 10 | Антенна | D 9 | 545 | 47.8 | 0.00871 | 0.25 | 0.5 |
Для исследования контура первоначально целесообразно использовать непрерывную модель цифрового контура в виде схемы (Рисунок 2), на которой алгоритмический блок заменен последовательным соединением передаточной функции аналогового ПИД-регулятора и звена запаздывания с постоянной запаздывания τ = T/2, где Т – период квантования в цифровом контуре.
Задание 1. Исследование характеристик контура с аналоговым ПИД-регулятором
Путем моделирования работы контура управления ОПУ определить передаточные коэффициенты kп, kи и kд аналогового ПИД-регулятора, обеспечивающие заданные показатели качества.
- Определение ограничений на период квантования в виде неравенств: где:
- τ0 – минимальное значение периода квантования, обеспечиваемое контроллером (техническая характеристика контроллера)
- Т* - верхняя граница, удовлетворяющая условию теоремы Котельникова
- ωm – максимальная частота в спектре входного сигнала системы
управления. В практических расчетах вместо ωm часто используют
частоту ωп – верхнюю границу интервала существенных частот, либо
задают верхнюю границу периода квантования на порядок меньше минимальной
постоянной времени объектов регулирования, одновременно обслуживаемых
контроллером:
В данной работе следует воспользоваться формулой, подставляя вместо TОmin величину TДПТ, и задать значение Т так, чтобы T ≈ 0.5T*.
- Сформировать структурную схему модели согласно рисунку (Рисунок 2). Сначала
сформировать ПИД-регулятор в субмодели. Для это необходимо:
- В окно проекта установить блок Субмодель и зайти в него
- В рабочей области блока Субмодель сформировать схему согласно рисунку (Рисунок 3). Установить на схему блоки Порт входа и Порт выхода из вкладки Субструктуры
- В схеме субмодели для блока Сумматор ввести значение "[1,1,1]"
- Значения свойств блоков с подписью "П", "И", "Д1" и "Д2", формирующих ПИД-закон управления в соответствии с передаточной функцией, задать равными "1"
- Нажать кнопку Возврат из субмодели для выхода в окно проекта
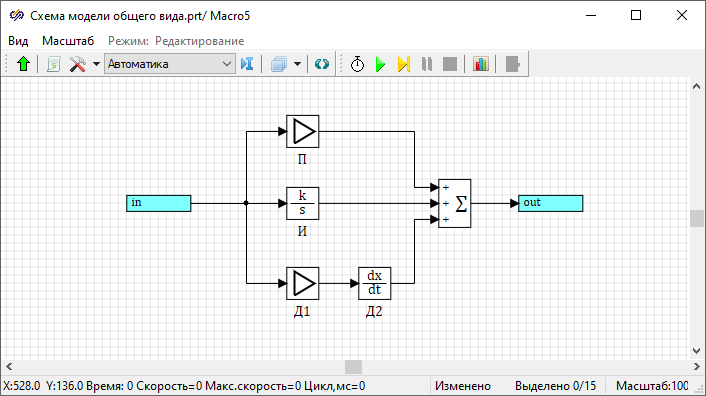
Рисунок 3. Структурная схема алгоритмического блока (ПИД-регулятор). - В окно проекта следует добавить блоки:
- 1 блок Ступенька и 1 блок Кусочно постоянная из вкладки Источники
- 1 блок Сравнивающее устройство, 1 блок Сумматор и 4 блока Усилитель из вкладки Операторы
- 1 блок Идеальное транспортное запаздывание и 1 блок Инерционно-интегрирующее звено из вкладки Динамические
- 2 блока Временной график из вкладки Вывод данных
Расположить блоки в окне проекта. Построить структурную схему согласно рисунку и сделать подписи блоков в соответствии с их функциональным назначением (Рисунок 4).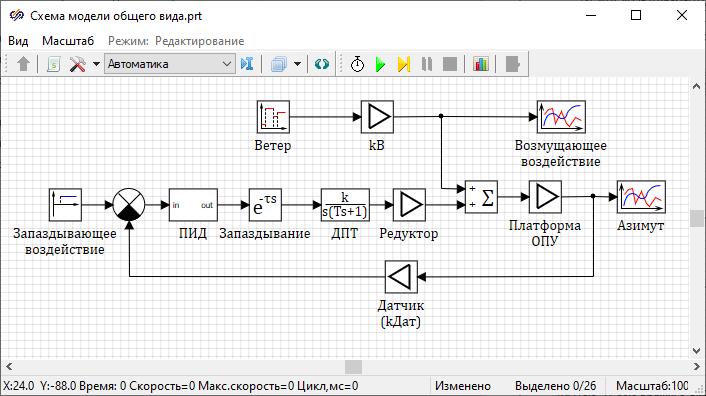
Рисунок 4. Структурная схема модели контура с использованием аналогового ПИД-регулятора в виде субмодели. - Задать свойства блокам:
- Параметры передаточных функций в блоках с подписями "kB", "ДПТ", "Редуктор" и "Платформа ОПУ" в соответствии с вариантом из таблицы (Таблица 1)
- В блоке с подписью "Запаздывание": "Время запаздывания" = "Т/2"
- В блоке с подписью "Задающее воздействие": "Конечное состояние" = "5", что соответствует повороту платформы ОПУ на 5 градусов
- В блоке с подписью "Ветер": последовательность порывов ветра величиной "1", "5", "3" и "1.2" м/с в течение "15", "10", "30" и "20"
- С помощью кнопки Параметры расчёта
необходимо открыть окно Параметры проекта
и установить следующие Параметры расчёта:
- "Минимальный шаг" = "0.000001"
- "Максимальный шаг" = "0.01"
- "Метод интегрирования" = "Адаптивный 1"
- "Конечное время расчета" = "60"
- Определить предварительные значения параметров kп и
kд алгоритмического блока (ПД-закона управления) методом
Циглера-Никольса (Лабораторная работа №2 пункт 2). В данном случае можно считать,
что kи равно "0", т.к. степень астатизма объекта управления равна
"1".Для этого необходимо отключить влияние ветрового возмущения (в блоке Сумматор установить "[1,0]"), а в субмодели задать свойства блокам:
- блок с подписью "И" – "Коэффициент усиления" = "0"
- блок с подписью "Д1" – "Коэффициент усиления" = "0"
Варьируя передаточный коэффициент блока с подписью "П" субмодели, добиться незатухающего гармонического процесса и на его основе найти значение Ткр периода незатухающих колебаний выходной величины – угла азимута.
В соответствии с методом Циглера-Никольса задать коэффициенты блоков субмодели для ПД-регулятора с учетом соотношений: kп* = 0.5*kПкр, TД = 0.05*Ткр; kд* = kПTД, провести моделирование и оценить полученные показатели качества. Если найденные tp и σ удовлетворяют условиям, что маловероятно, задание выполнено. Противоположная ситуация означает, что приближенный эмпирический метод Циглера-Никольса не всегда гарантирует получение заданных показателей качества. Улучшенных или оптимальных показателей качества можно достичь либо подбором варьируемых параметров kп и kд, либо их оптимизацией. На следующем шаге попытаться определить искомые kп и kд методом подбора - Попеременно изменяя kп и kд и проводя моделирование после каждого изменения одного из параметров, требуется найдите такую пару kп и kд , лежащих в окрестности kп* и kд* , которая обеспечивает выполнение условий. Полученный график переходного процесса φ(t) и соответствующие значения kп и kд сохранить в отчет
Задание 2. Исследование характеристик контура с дискретным ПИД-регулятором
Путем моделирования работы цифрового контура управления ОПУ и сравнения с результатами предыдущего задания оценить адекватность непрерывной модели цифрового контура его непрерывно-дискретной модели.
- С целью сравнения зависимостей φ(t), полученных с применением аналогового и
дискретного ПД-регуляторов, выполнить совместное моделирование работы контура на основе
непрерывной и непрерывно-дискретной моделей с выводом графиков переходных процессов в
одно графическое окно.
Для этого в окне проекта выделить все блоки и их связи, используя команду Выделить все из меню Правка. С помощью команд Копировать и Вставить меню Правка или одноименных кнопок или сочетаний клавиш "Ctrl+C" и "Ctrl+V" создать копию ранее созданной структурной схемы, расположив ее в нижней части окна проекта. В нижней схеме удалить блоки ПИД и звено запаздывания вместе с их связями. На их место установить блок Дискретный ПИД-регулятор из вкладки Дискретные.
Добавить в окно проекта еще один блок Временной график, задать "Количество входных портов" равным "2" и сделать подписи блоку: "Азимуты". Необходимо отредактировать положение блоков на схеме, добавить подписи к блокам, добавить недостающие линии связи. Схема изображена на рисунке (Рисунок 5).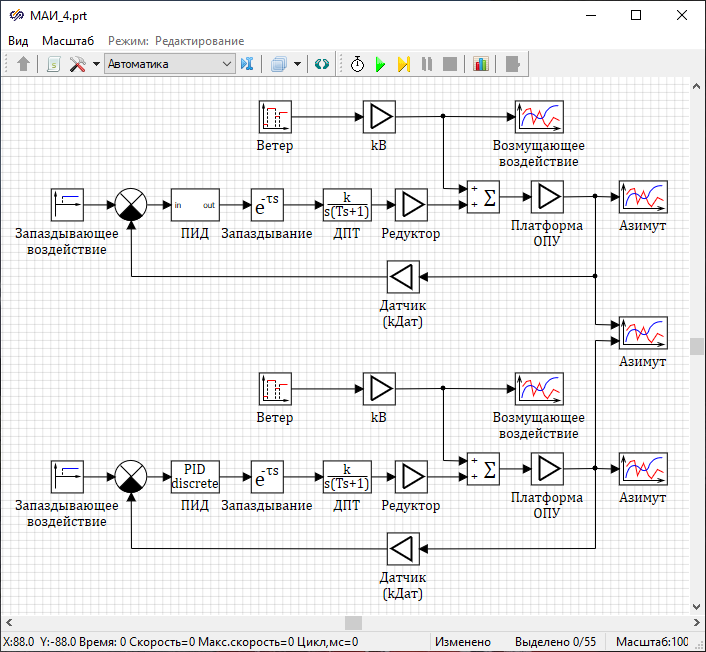
Рисунок 5. Непрерывная и непрерывно-дискретная модели контура управления ОПУ. - Установить следующие свойства блока Дискретный
ПИД-регулятор:
- "Период квантования" - значение Т найдено в пункте 1 задания 4.1
- "Пропорциональная составляющая" - значение kП найдено в пункте 8 задания 4.1
- "Интегральная составляющая" равна "0"
- "Дифференциальная составляющая" - значение kд найдено в пункте 8 задания 4.1.
Оформить заголовок, цвет кривых и подписи легенды в блоке с подписью "Азимуты": (- нажать правой кнопкой мыши на окон графика и выбрать в контекстном меню пункт Свойства
- в окне Свойства графика на вкладке Общие в поле "Заголовок" вписать "Сравнение аналогового и дискретного регуляторов"
- на вкладке Графики и оси задать цвета кривых по собственному усмотрению и задать идентифицирующие названия, например, "Аналоговая модель" и "Дискретная модель"
- Провести моделирование и по графикам, отображаемым в блоке с подписью "Азимуты", оценить величину расхождения кривых, соответствующих непрерывной и непрерывно-дискретной модели контура управления ОПУ. Сохранить в отчет график и значения коэффициентов регулятора. В отчете сделать вывод об адекватности непрерывной и непрерывно-дискретной моделей при назначенной величине периода квантования
- Провести моделирование еще два раза, задав период квантования вдвое меньше и вдвое больше. Графики сохранить в отчет. Сравнить полученные графики, оценить влияние величины периода квантования на точность результатов и в отчете сделать соответствующий вывод
Контрольные вопросы
- Что такое цифровая система управления?
- Что такое дискретный закон управления? Какова его математическая модель?
- В каком устройстве реализуется дискретный закон управления?
- Что такое АЦП? Какова статическая характеристика АЦП?
- Что такое ЦАП? Какова статическая характеристика ЦАП?
- Что такое аналоговый ПИД-регулятор?
- Как выглядит выражение для передаточной функции технически реализуемого аналогового ПИД-регулятора?
- Что такое непрерывная модель непрерывно-дискретной системы управления?
- В чем особенность замены цифровой системы непрерывной моделью?
- Какое устройство из состава цифровой системы управления накладывает ограничение на минимальное значение периода квантования?
- Что такое дискретный ПИД-регулятор?
- Как выглядит выражение для передаточной функции технически реализуемого дискретного ПИД-регулятора?
- Каков статический коэффициент усиления ПИД-регулятора?
- Как найти статический коэффициент усиления системы с ПИД-регулятором?
- Какие преимущества при моделировании дает использование субмодели?
- Как скопировать часть сложной структурной схемы?
- Как отредактировать заголовок графика и подписи осей?
- Как добавить легенду на график и как ее редактировать?
- Как изменить размер шрифта надписей на графике?
- Как изменяются свойства систем с дискретизированными регуляторами при увеличении периода квантования?