Лабораторная работа №1 по курсу «компьютерное моделирование технических систем автоматического управления»
Цели работы:
- Приобрести первичные навыки работы в SimInTech для исследования временных и частотных характеристик непрерывных (аналоговых) систем управления техническими объектами.
Задачи работы:
- Углубить понимание отдельных понятий и вопросов теории автоматического управления (типовые звенья САУ, модель «вход-выход», переходная характеристика, частотные характеристики и их виды, модель в пространстве состояний, время регулирования, перерегулирование, запасы устойчивости и др.).
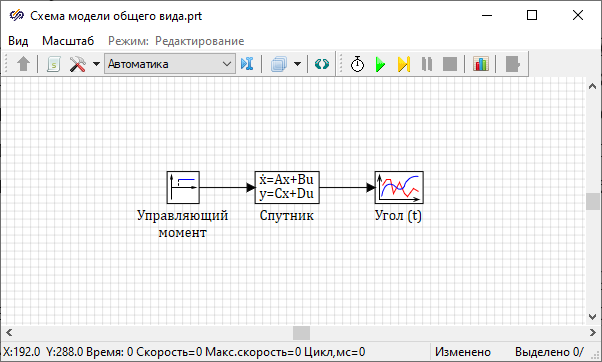
- Освоить процедуры формирования структурной схемы модели, выбора метода и параметров интегрирования, ввода свойств блоков, вывода данных расчета.
- Освоить основные методы моделирования.
- Освоить основные методы анализа.
- Проследить с помощью компьютерного эксперимента влияние параметров используемой модели на временные и частотные характеристики системы стабилизации.
- Оформить отчет о результатах исследования.
Объект исследования
Стабилизация спутников дистанционного зондирования осуществляется, как правило, по трем осям. В данной работе считается, что перекрестными связями между каналами управления по осям X, Y, Z можно пренебречь и контуры стабилизации по каждой оси независимы. Для простоты рассматривается контур стабилизации по одной оси.
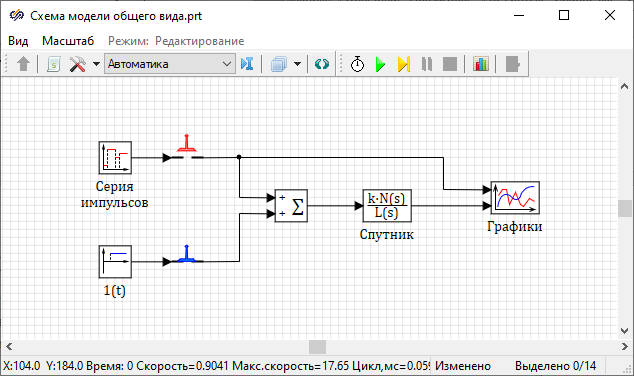
Схема, поясняющая работу системы стабилизации спутника по одной оси приведена на рисунке (Рисунок 1). Датчик угла ориентации измеряет отклонение углового положения спутника ϑ, а датчик угловой скорости измеряет скорость изменения углового отклоненияdϑ/dt.
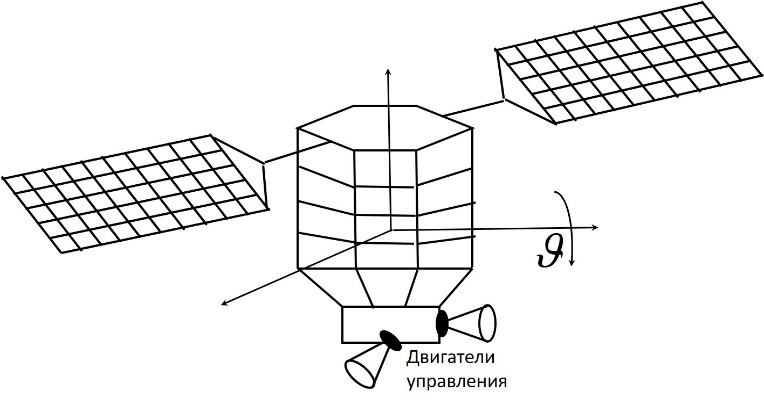
Рисунок 1. Схема спутника.
Двигатели управления создают момент, корректирующий угловое положение спутника в соответствии с показаниями датчиков.
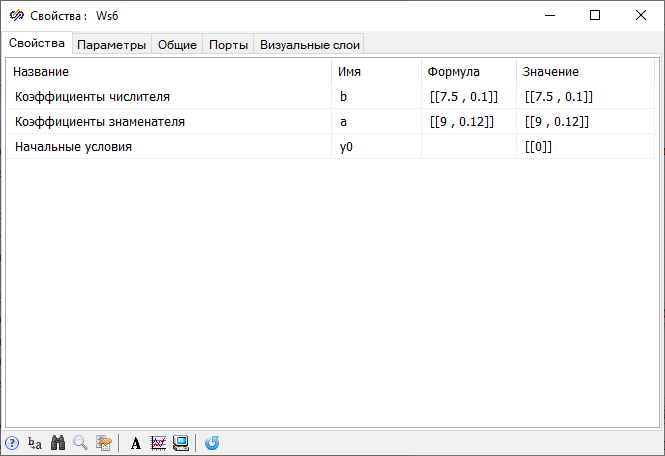
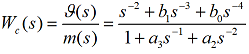
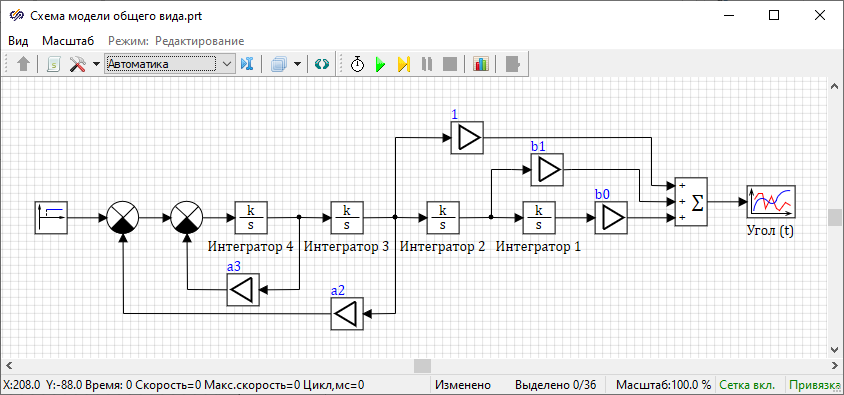
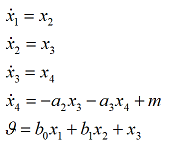
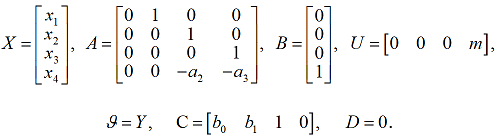
Анализ уравнения динамики движения спутника вокруг центра масс позволяет получить передаточную функцию упрощенной модели ориентации спутника относительно одной оси, как отношение изображения угла ϑ, определяющего положение спутника, к изображению управляющего момента m:
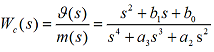
где b0, b1, a2, a3 – постоянные коэффициенты, зависящие от конструктивных параметров спутника (Таблица 1).
| Вариант | b0 | b1 | a2 | a3 |
|---|---|---|---|---|
| 1 | 7.5 | 0.1 | 9 | 0.12 |
| 2 | 7 | 0.2 | 10 | 0.15 |
| 3 | 8 | 5.2 | 14 | 0.5 |
| 4 | 8.5 | 3.5 | 4 | 0.3 |
| 5 | 9 | 4 | 8 | 0.4 |
| 6 | 9.5 | 3 | 7 | 0.8 |
| 7 | 6.5 | 0.5 | 12 | 0.7 |
| 8 | 5 | 5 | 5 | 0.5 |
| 9 | 4 | 3.5 | 4 | 0.4 |
| 10 | 6 | 0.8 | 11 | 0.6 |