Неявный источник профиля движения
Модель неявного источника профиля движения
Расположение
SimInTech\Demo\Механика\Механические источники\Неявный источник профиля движения\Неявный источник профиля движения.prt
Описание
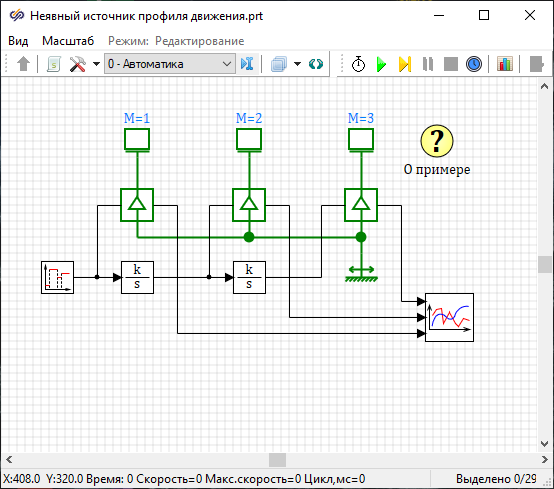
Данный проект демонстрирует возможности библиотеки "Механика" по моделированию движения твердых тел с неявно заданным законом изменения положения.
Блок "Кусочно постоянная" задает закон изменения ускорения движения.
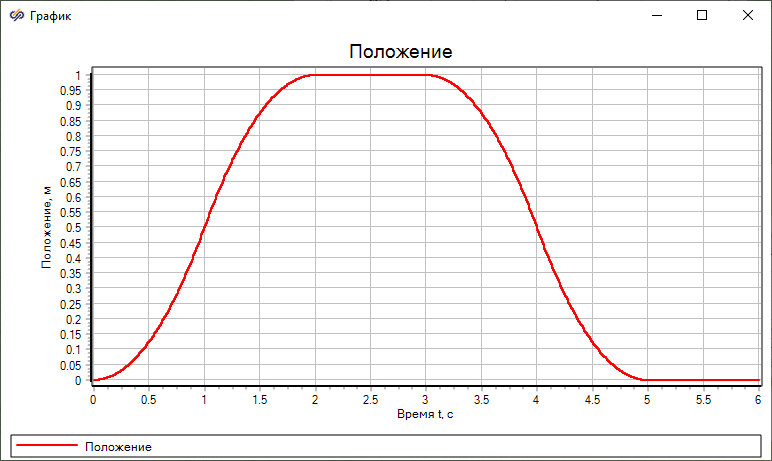
Блоки "Интегратор" интегрируют его и рассчитывают законы изменения скорости и положения.
Блоки "Масса", моделирующие движение тел, подключены к входным портам блоков "Задатчик профиля поступательного движения", которые задают ускорение, скорость и положение тел (профиль движения). Профиль движения задается неявным образом: блоки "Задатчик профиля поступательного движения" рассчитывают силу, необходимую для обеспечения движения тел с заданными профилями движения.
В данной модели значения сил будут пропорциональны ускорению и массе тела.
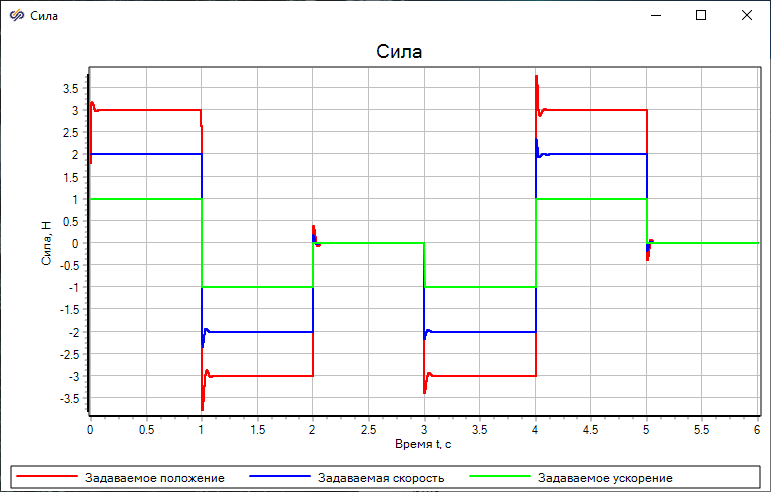
При ступенчатом изменении ускорения, рассчитывающегося автоматически при задании профиля скорости и положения, графики сил имеют дребезг, вызванный погрешностями дифференцирования.