Описание модели
Общая структура модели
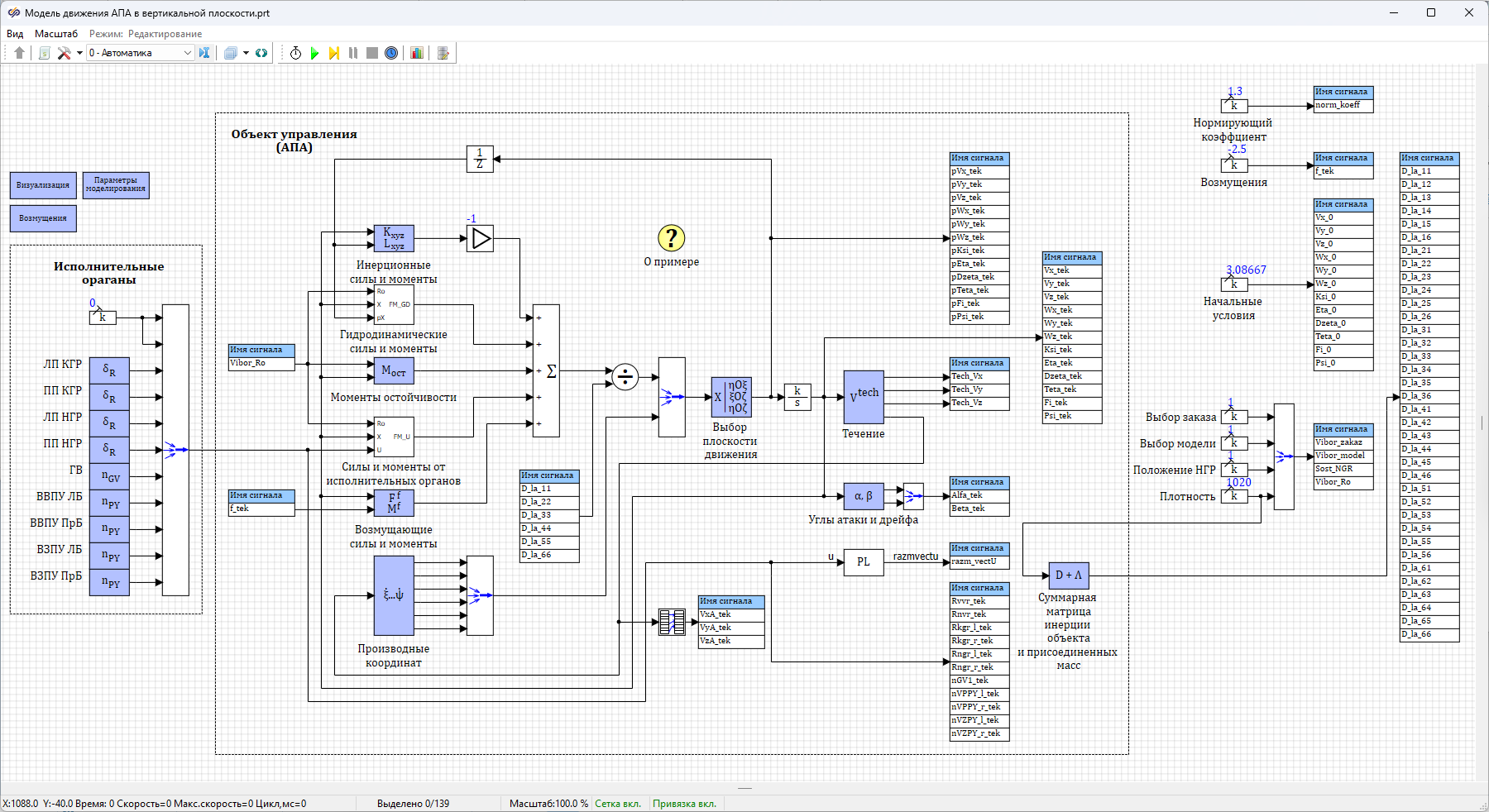
- Блок "Параметры моделирования"
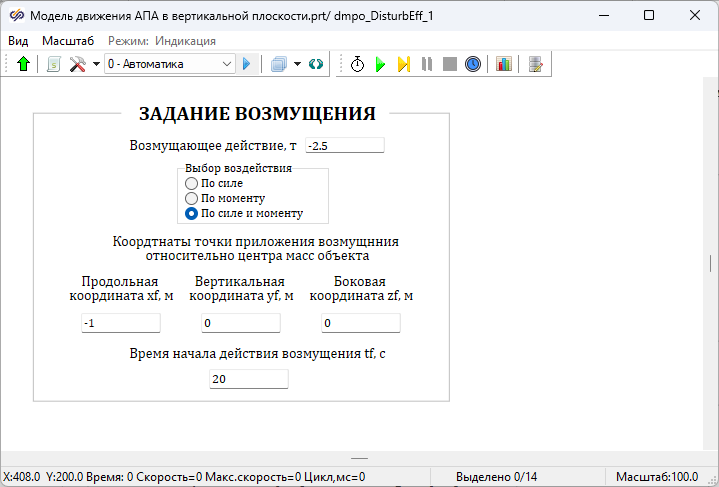
- Блок "Возмущения"
- "Исполнительные органы"
- "Объект управления (АПА)"
- Блок "Визуализация"
Каждая область представляется блоком или набором блоков из библиотеки "Динамика МПО" с установленными свойствами для каждого моделируемого режима движения. Значения свойств блоков, задаваемые через поле "Формула" в разделе "Свойства блока", соответствуют названиям параметров в БД.
- связь задаваемых параметров в модели с параметрами, записываемыми в БД
- выбор необходимых свойств АПА из БД по установленным в модели параметрам
Связи между блоками и субмоделями в примере осуществляются через БД и через скрипт главного окна модели.
Области модели
Модель содержит следующие области:
1. Область модели "Блок "Параметры моделирования"
Область включает в себя один блок "Параметры моделирования" из вкладки "Динамика МПО".
В блоке "Параметры моделирования" задаются начальные условия для моделирования движения АПА.
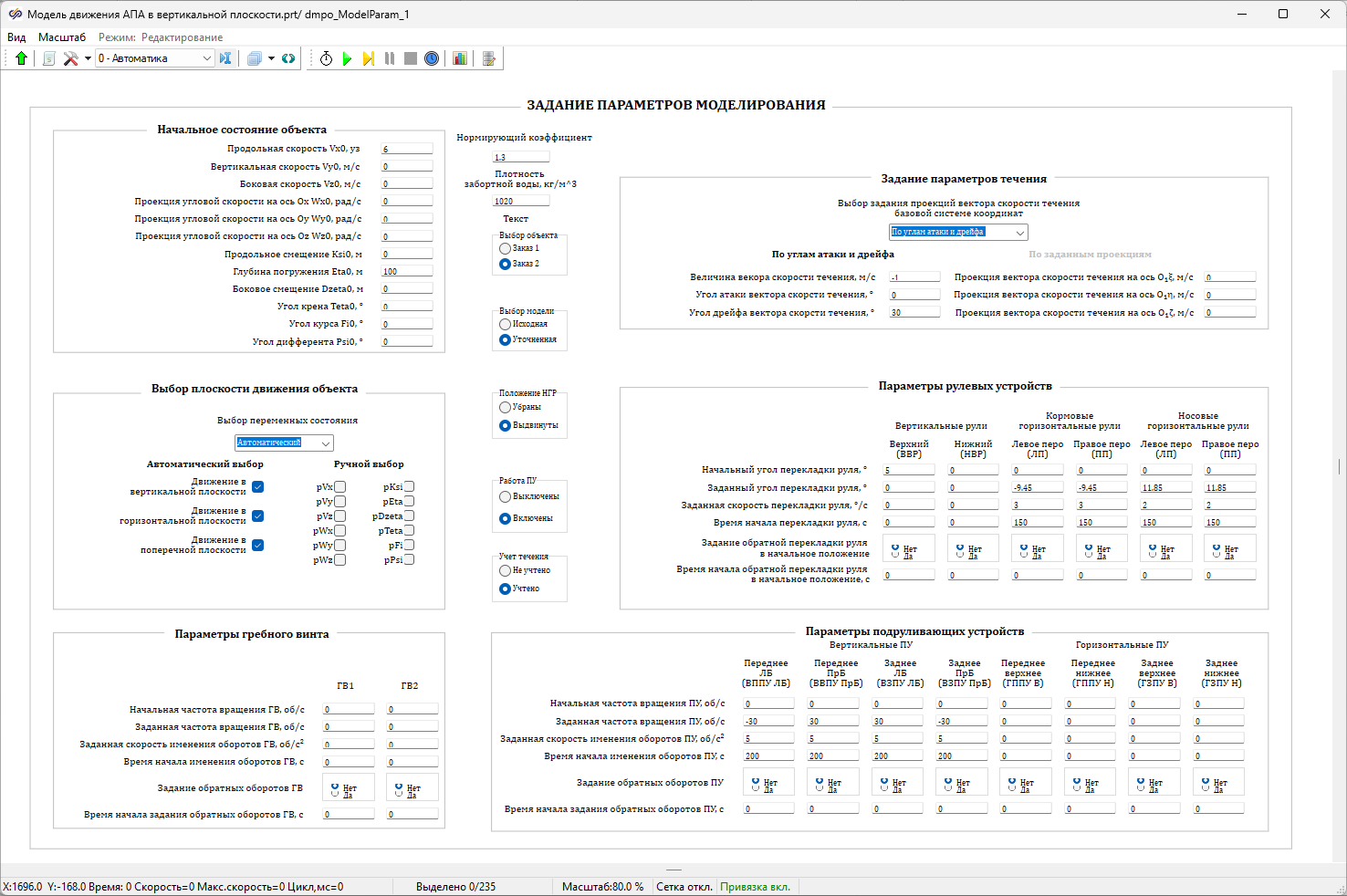
В субмодели блока в области "Выбор плоскости движения объекта" осуществляется выбор переменных состояния для движения АПА в соответствии с таблицей (Таблица 7 в разделе "Исходные параметры и моделируемые режимы движения АПА").
В области "Параметры рулевых устройств" задаются значения, характеризующие перекладку рулей, в соответствии с таблицей (Таблица 7 в разделе "Исходные параметры и моделируемые режимы движения АПА").
В остальных областях блока в соответствии с таблицей (Таблица 7 в разделе "Исходные параметры и моделируемые режимы движения АПА") для моделируемого режима выбирается АПА, его модель, положение НГР, работа ПУ, учет течения, задаются нормирующий коэффициент и плотность забортной воды, параметры ГВ и ПУ.
2. Область "Блок "Возмущение"
Область включает в себя один блок "Возмущения" из вкладки "Динамика МПО". Блок реализует задание параметров возмущающих воздействий, влияющих на движение АПА.
3. Область "Исполнительные органы"
Область включает в себя четыре блока "Руль", блок "Гребной винт" и четыре блока "Подруливающее устройство" из вкладки "Динамика МПО". Каждый блок соответствует перу горизонтальных рулей – "ЛП КГР", "ПП КГР", "ЛП НГР", "ПП НГР"; гребному винту – "ГВ"; подруливающим устройствам побортно – "ВВПУ ЛБ", "ВВПУ ПрБ", "ВЗПУ ЛБ", "ВЗПУ ПрБ".
Значения свойств данных блоков заполняются автоматически при инициализации моделирования из блока "Параметры моделирования" с помощью скрипта главного окна проекта.
- "+" – на погружение (перекладка руля против часовой стрелки)
- "-" – на всплытие (перекладка руля по часовой стрелке)
4. Область "Объект управления (АПА)"
- 1 блок "Инерция (список)": блок реализует расчет суммарной матрицы инерции АПА и присоединенных масс
- 1 блок "Инерционные силы и моменты (список)": блок реализует расчет вектора проекций инерционных силы и момента АПА
- 3 блока "ГД силы и моменты ВП (список)" в составе субмодели "Гидродинамические силы и моменты": блок реализует расчет выбранной проекции на оси связанной системы координат гидродинамических силы или момента при движении объекта в вертикальной плоскости
- 1 блок "Моменты остойчивости": блок реализует расчет вектора проекций момента остойчивости на оси связанной системы координат
- 2 блока "Силы и моменты от руля (список)" в составе субмодели "Силы и модели от исполнительных органов": блок реализует расчет проекций силы и момента от перекладки руля морского подвижного объекта
- 1 блок "Силы и моменты от гребного винта (список)" в составе субмодели "Силы и модели от исполнительных органов": блок реализует расчет проекций силы и момента от работы ГВ морского подвижного объекта
- 4 блока "Силы и моменты от подруливающего устройства (список)" в составе субмоделей "Силы и модели от исполнительных органов" и "Силы и моменты от ВПУ": блок реализует расчет проекций силы и момента от работы ПУ морского подвижного объекта
- 1 блок "Возмущающие силы и моменты": блок реализует расчет проекций силы и момента на оси связанной системе координат от действия заданного возмущения
- 1 блок "Производные координат": блок реализует расчет производных линейных и угловых координат объекта
- 1 блок "Выбор плоскости движения": блок реализует выбор переменных состояния для заданного вида движения
- 1 блок "Углы атаки и дрейфа": блок реализует расчет производных линейных и угловых координат объекта
5. Область "Блок "Визуализация"
Область включает в себя один блок "Визуализация" из вкладки "Динамика МПО".
В блоке реализован графический вывод параметров движения модели МПО. Дополнительно реализована запись параметров в файл с помощью блока "В файл" из вкладки "Вывод данных".
Для данного примера выводятся параметры на графике "Движение объекта в вертикальной плоскости". Настройка выводимого графика производится с помощью графического примитива "График".
Свойства блоков области "Объект управления (АПА)"
Значения свойств блока "Инерция (список)" заполняются автоматически значениями из категории БД "Параметры заказа" групп "Param" и "norm" после инициализации модели, с помощью задания имени сигналов в разделе "Формула". На выходе блока формируется суммарная матрица инерции АПА, которая записывается в БД в категорию "Суммарная матрица инерции".
Значения свойств блока "Инерционные силы и моменты (список)" заполняются автоматически значениями из категории БД "Суммарная матрица инерции" группы "Dla" после инициализации модели, с помощью задания имени сигналов в разделе "Формула". Значение свойства "koeff_GDX" устанавливается вручную: для данного примера установлено значение "Учтены" (инерционные составляющие учитываются в составе ГДХ).
Внимание: после инициализации модели необходимо проверить корректность значений свойств блока и значений, заданных в БД.
На вход блока "Инерционные силы и моменты (список)" подаются полные вектор переменных состояния "Х" и вектор производных переменных состояния "рХ" через обратную связь с выхода объекта управления (АПА). На выходе блока формируется вектор инерционных сил и моментов с обратным знаком, который поступает на сумматор для формирования общего вектора производных переменных состояния рХ.
- "Проекция гидродинамической силы Fx_GD"
- "Проекция гидродинамической силы Fy_GD"
- "Проекция гидродинамического момента Mz_GD"
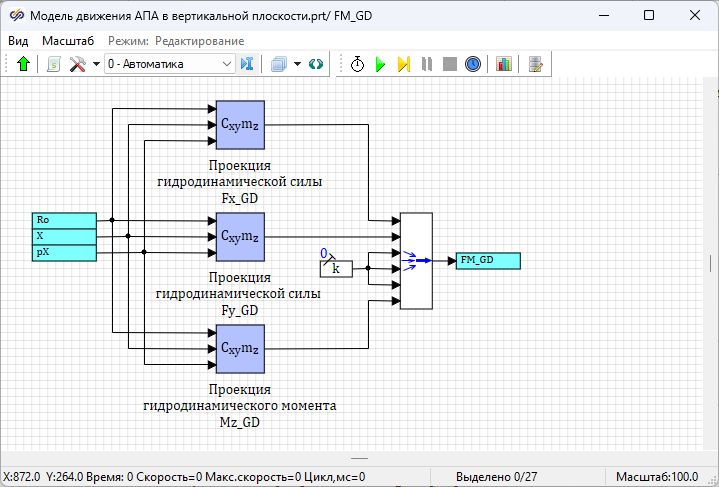
- в блоке с подписью "проекция гидродинамической силы Fx_GD" – "Для сил"
- в блоке с подписью "проекция гидродинамической силы Fy_GD" – "Для сил"
- в блоке с подписью "проекция гидродинамического момента Mz_GD" – "Для моментов"
- значение плотности забортной воды из БД из категории "Расчет" группы "Vibor"
- полные вектор переменных состояния Х и вектор производных переменных состояния рХ через обратную связь с выхода объекта управления (АПА)
На выходе каждого из блоков внутри субмодели "Гидродинамические силы и моменты" формируется скалярное значение проекции силы или момента, которые объединяются в вектор гидродинамических сил и моментов, дополняемый нулевыми элементами (проекциями гидродинамической силы и момента в горизонтальной и поперечной плоскостях). Сформированный полный вектор гидродинамических сил и моментов на выходе субмодели поступает на сумматор для формирования общего вектора производных переменных состояния рХ.
Свойства блока "Моменты остойчивости" заполняются автоматически значениями из категории БД "Параметры заказа" групп "Param" и "norm" после инициализации модели, с помощью задания имени сигналов в разделе "Формула".
Внимание: после инициализации модели необходимо проверить корректность значений свойств блока и значений, заданных в БД.
Из рассчитанных значений моментов остойчивости в блоке формируется выходной вектор, который дополняется первыми тремя нулевыми элементами. Сформированный на выходе блока полный вектор моментов остойчивости поступает на сумматор для формирования общего вектора производных переменных состояния рХ.
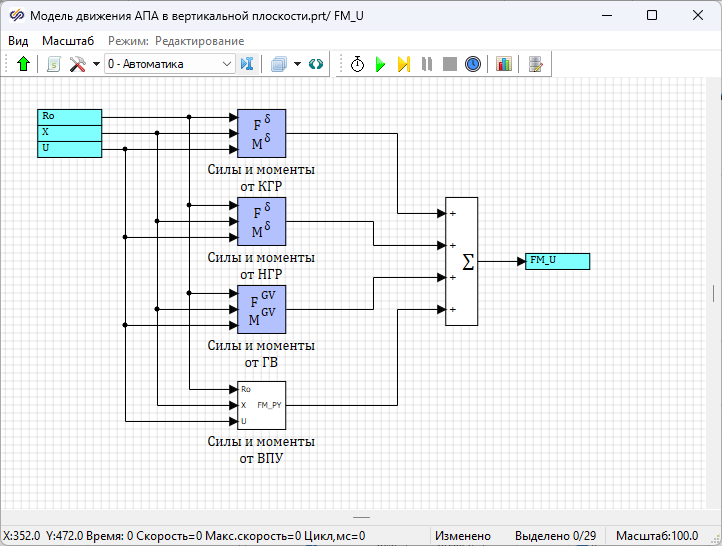
- "Силы и моменты от КГР"
- "Силы и моменты от НГР"
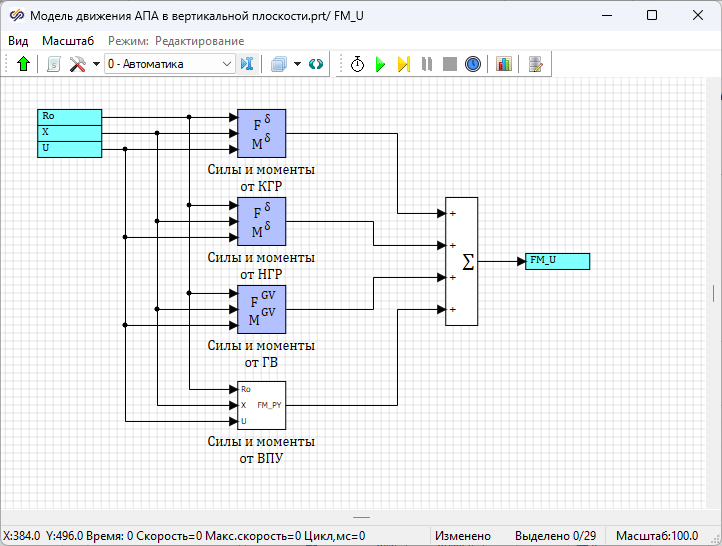
Значения свойств блоков "Силы и моменты от руля (список)" с подписями "Силы и моменты от КГР" и "Силы и моменты от НГР" заполняются автоматически значениями из категории БД "Параметры заказа" группы "Param" (свойство "Водоизмещение МПО, м3"), категории "ГДХ рулей" групп "kgr" и "ngr" (для КГР и НГР соответственно) категории "Расчет" группы "razm" (свойство "Размерность вектора управления") после инициализации модели, с помощью задания имени сигналов в разделе "Формула". Значения свойств "Номер руля (номера рулей) в векторе управления", "Вид конструкции руля", "Вид парной конструкции руля" устанавливается вручную.
- для КГР (для всех режимов):
- "Номер руля (номера рулей) в векторе управления" ("R_numb") – "[3, 4]"
- "Вид конструкции руля" ("R_para") – "Парная"
- "Вид парной конструкции руля" ("R_razrez") – "Разрезная"
- для НГР (для всех режимов):
- "Номер руля (номера рулей) в векторе управления" ("R_numb") – "[5, 6]"
- "Вид конструкции руля" ("R_para") – "Парная"
- вектор управления U
- значение плотности забортной воды из БД из категории "Расчет" группы "Vibor"
- полный вектор переменных состояния Х через обратную связь с выхода объекта управления (АПА)
- "Вид парной конструкции руля" ("R_razrez") – "Разрезная"
На выходе каждого блока "Силы и моменты от руля(список)" с подписями "Силы и моменты от КГР" и "Силы и моменты от НГР" формируется вектор проекций силы и момента на руле, которые потом суммируются вместе с вектором проекций сил и моментов от гребного винта, образуя полный вектор сил и моментов от исполнительных органов АПА.
На вход блока "Силы и моменты от гребного винта (список)" поступает полный вектор переменных состояния Х через обратную связь с выхода объекта управления (АПА). На выходе блока формируется вектор проекций сил и моментов от гребного винта.
Сформированный полный вектор сил и моментов от исполнительных органов на выходе субмодели поступает на сумматор для формирования общего вектора производных переменных состояния рХ.
Значения свойств блока "Возмущающие силы и моменты" заполняются автоматически значениями из категории БД "Параметры заказа" групп "Param" (свойства "Ускорение свободного падения") и из блока "Возмущения" с помощью скрипта главного окна модели.
- полный вектор переменных состояния Х через обратную связь с выхода объекта управления (АПА)
- текущее значение возмущающего воздействия из БД
На выходе блока формируется вектор проекций возмущающих силы и момента. Полученный вектор поступает на сумматор для формирования общего вектора производных переменных состояния рХ.
На вход блока "Производные координат" подается полный вектор переменных состояния Х через обратную связь с выхода объекта управления (АПА). На выходе блока формируется шесть значений производных угловых и линейных координат АПА. Сформированные значения производных объединяются с общим вектором сил и моментов АПА и образуют вектор производных переменных состояния рХ.
Значения свойств блока "Выбор плоскости движения" заполняются автоматически значениями из блока "Параметры моделирования" с помощью скрипта главного окна модели при инициализации модели.
На вход блока "Выбор плоскости движения" подается полный вектор переменных состояния Х (сформированный из полного вектора сил и моментов, действующих на АПА, и полного вектора производных координат АПА). На выходе блока формируется вектор с размерностью равной входному вектору и с переменными состояния, характерными для заданного вида движения МПО и остальными нулевыми элементами.
На вход блока "Углы атаки и дрейфа" подается полный вектор переменных состояния Х через обратную связь с выхода объекта управления (АПА). Формируемый на выходе угол атаки АПА записывается в БД в категорию "Расчет".
Результаты моделирования режимов
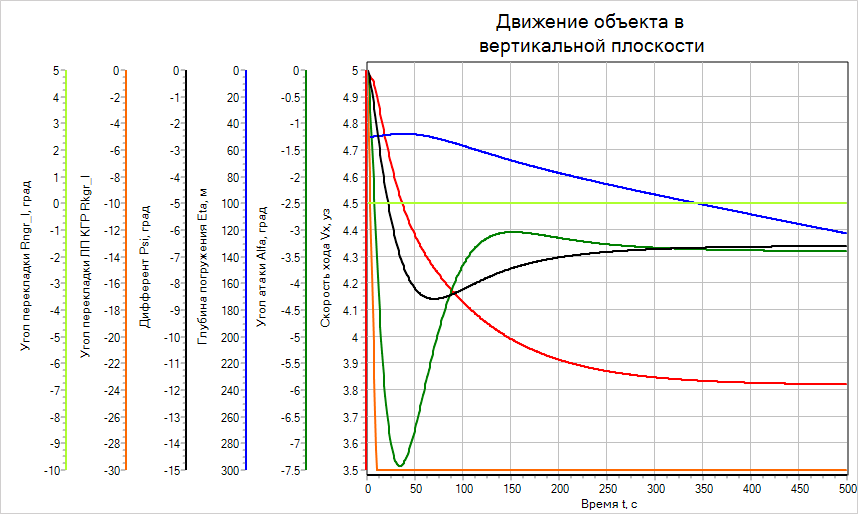
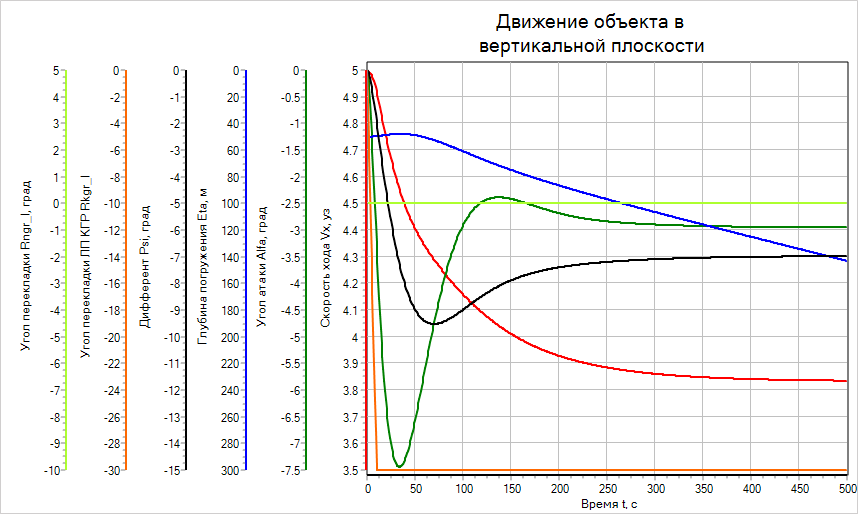
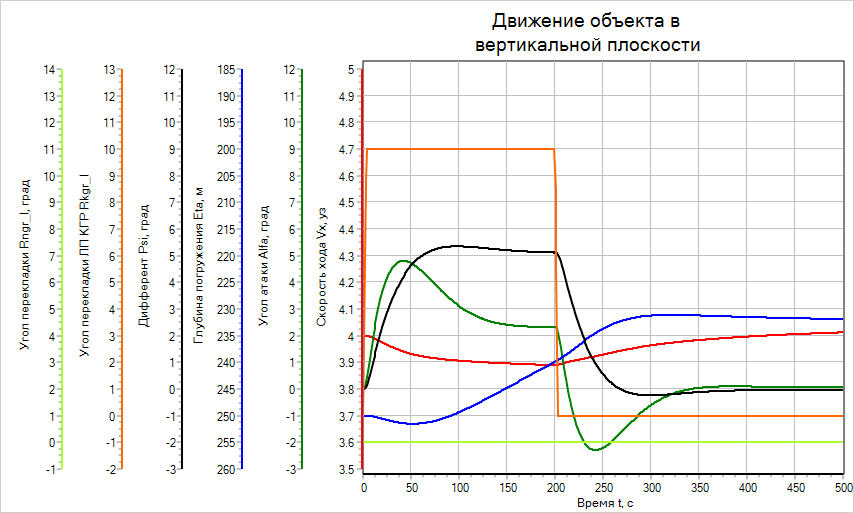
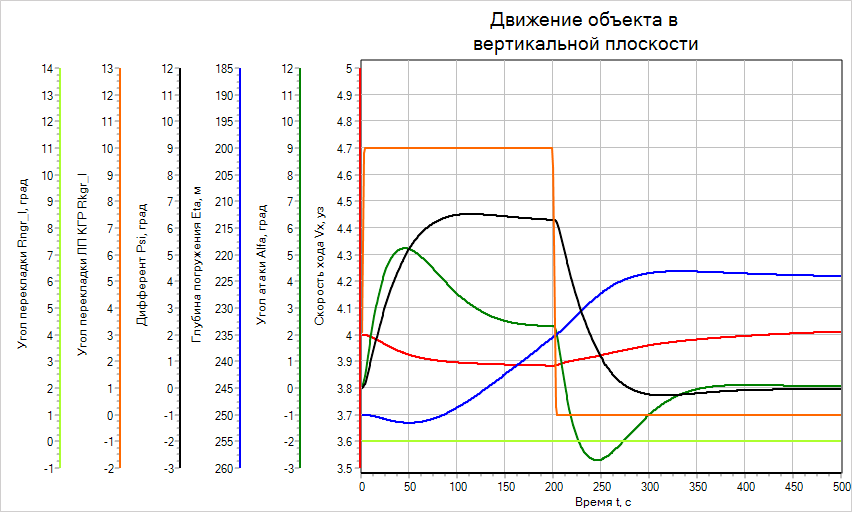
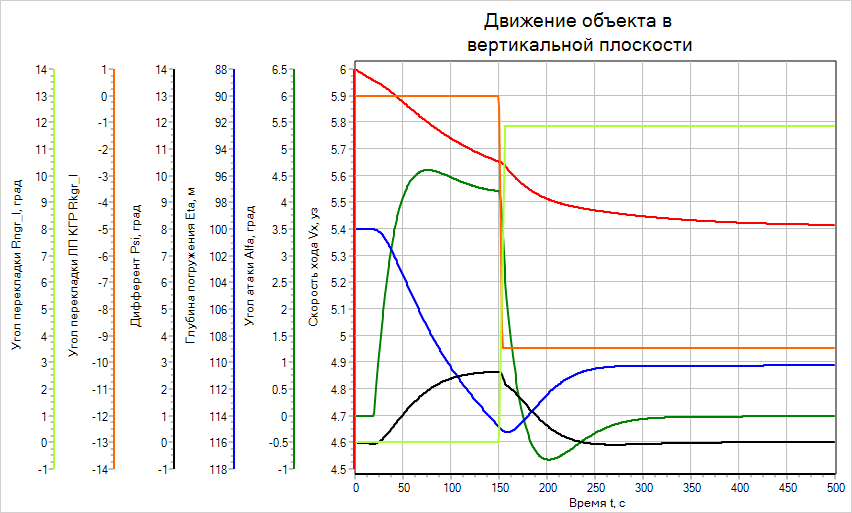
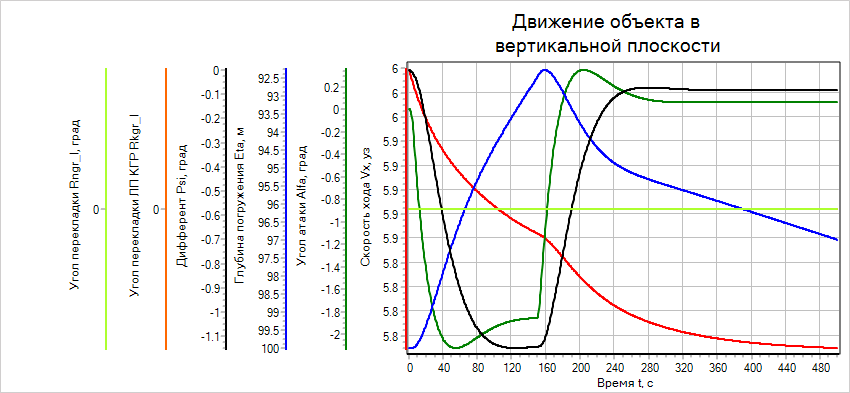
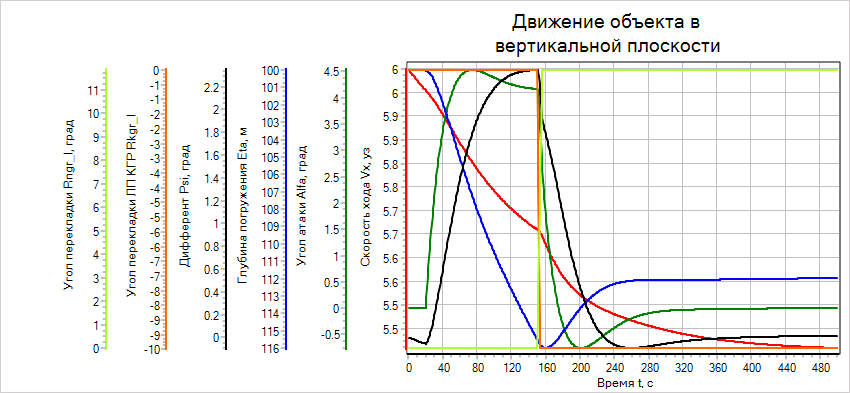
Представленные графики соответствуют реальным параметрам движения АПА, что подтверждает правильную работу модели.